UWIS sukellus: Viistokaiku etsintä
UWIS yhteistyössä DeepVision viistokaikulaitteiston kanssa (Karlskrona, Ruotsi).
Tehtävä: Toimittaa UWIS Ruotsin Puolustusvoimille sekä kouluttaa ja harjoitella yhdessä DeepVisionin edustajan kanssa UWIS:n ja viistokaikulaitteiston yhteistyötä.
Katso video täältä:
Sonar & UWIS
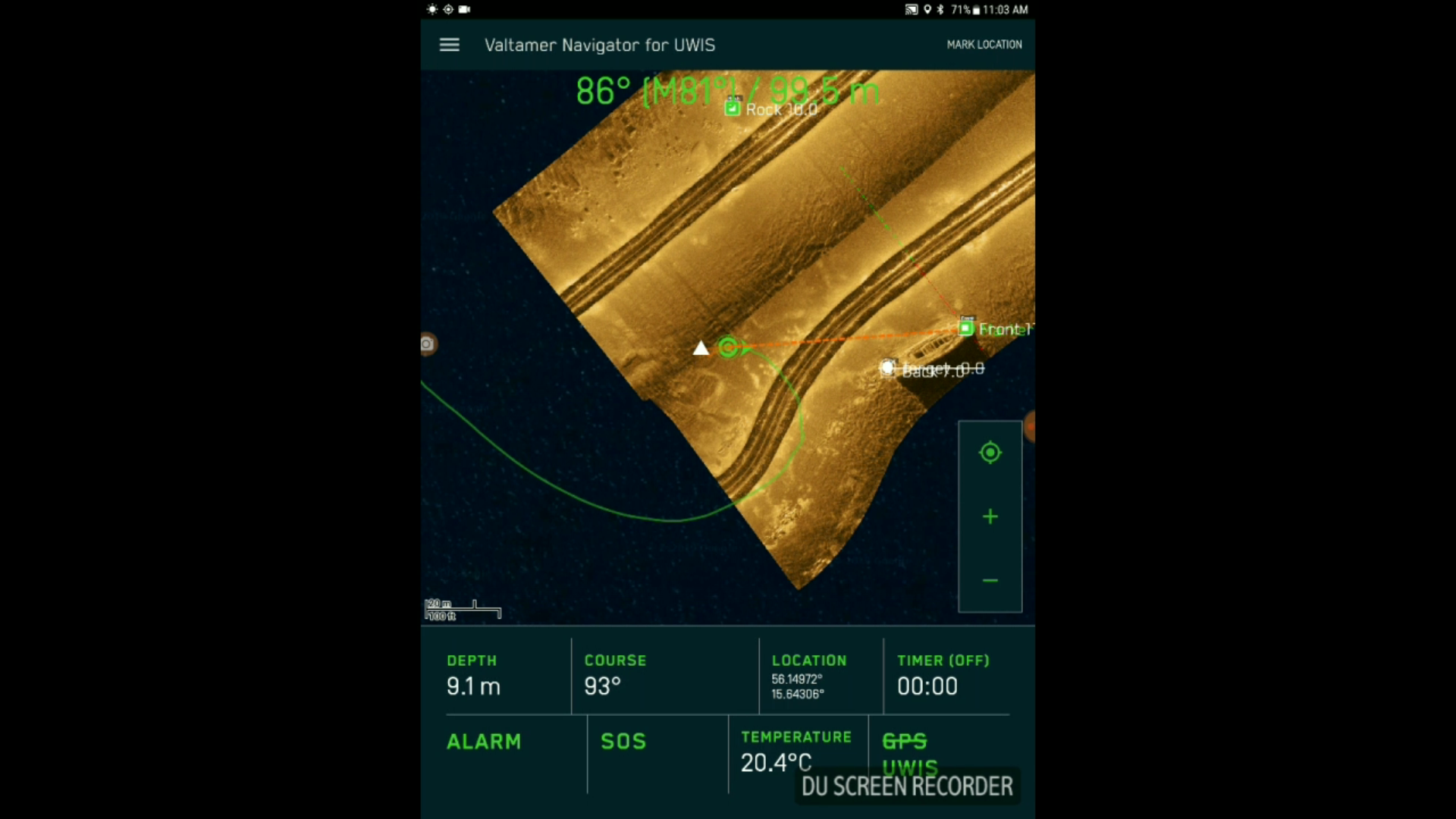
Ensimmäisellä venematkalla DeepVisionin edustaja ohjasi meitä käyttämään heidän viistokaikulaitteistoaan parhaalla mahdollisella tavalla. Heidän DeepView ohjelmastaan saa tallennettua löydökset georeferoiduksi kuvaksi, joka taas voidaan siirtää Alltabin navigointiohjelmistoon "Valtamer Navigator for UWIS" taustaksi (overlay).
Veden lämpötila oli n. 17 astetta, näkyvyys vedessä n. 6 metriä ja maksimisyvyys noin 10m
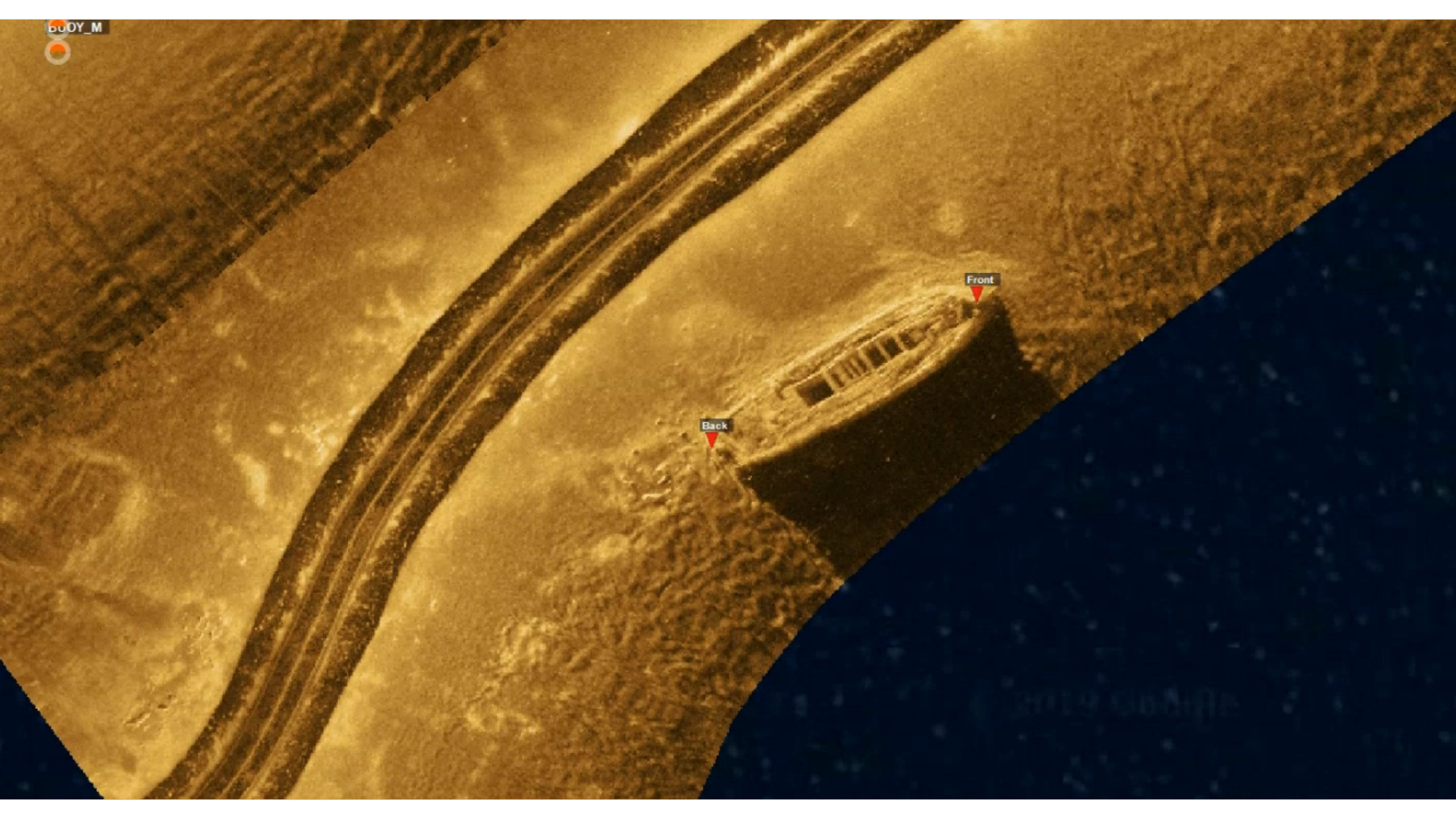
Oheisessa kuvassa näkyy viistokaiku-kuva, joka siis siirrettiin näkymään myös sukeltajan navigointilaitteeseen.
Harjoituksessa valittiin kolme havainnollista kohdetta ja tarkoitus oli selvittää miten hyvin kohteet löytyvät tukeutuen UWIS:iin ja navigaatio-ohjelman ohjaukseen. Jotta harjoitus olisi riittävän haastava, sukeltajat päätettiin laskea n. 100m päässä ensimmäisestä kohteesta. Niin ikään kohteet kierrettiin niin, että niiden välinen matka oli vähintään 80m. Näin pitkien matkojen päästä kohteiden löytäminen alhaisessa näkyvyydessä, välillä alueella pyörien, olisi lähes mahdottomuus ilman navigointijärjestelmää.
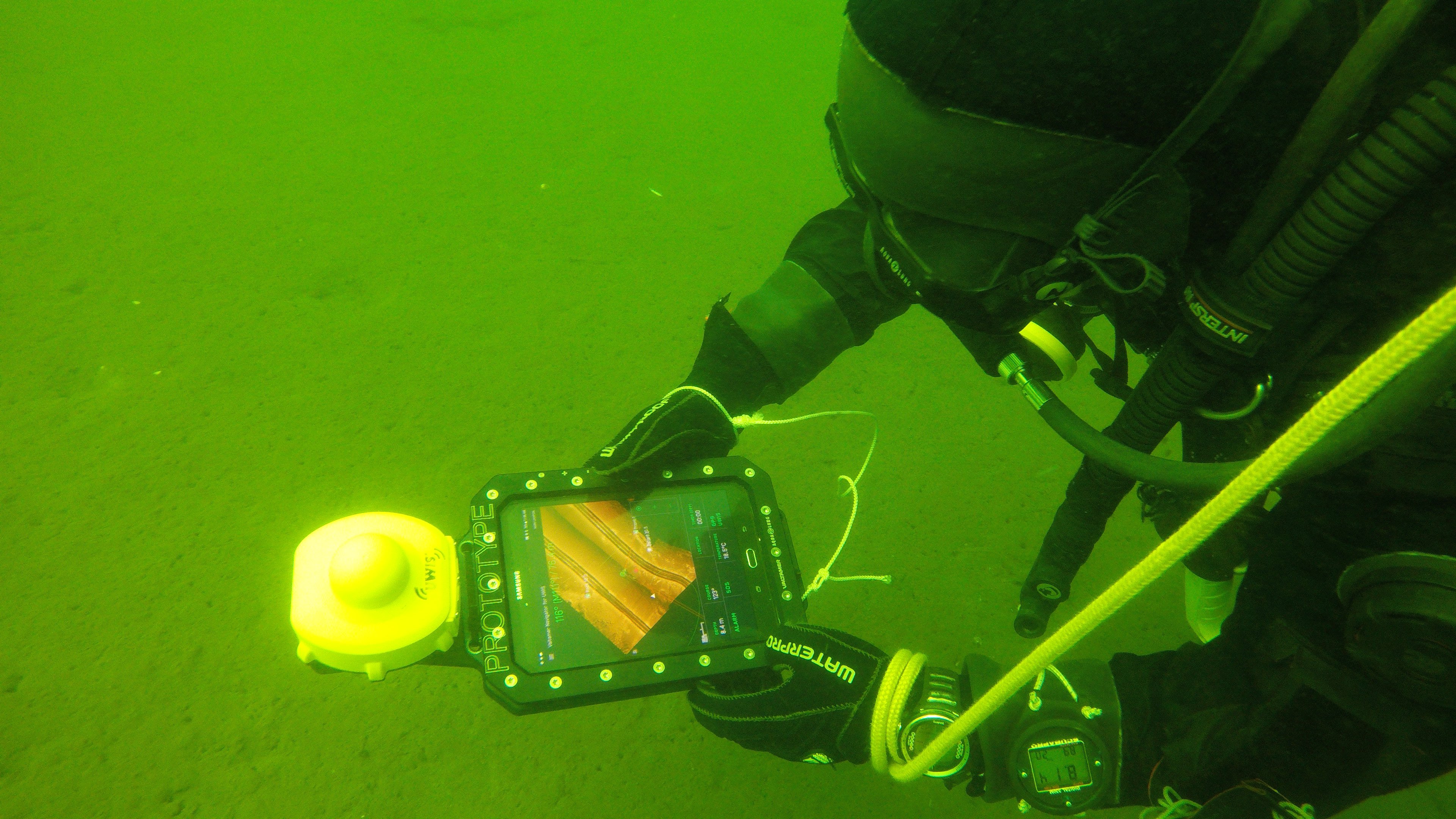
Alla kuvia siitä miten sukellus eteni. Ensin miltä se näytti pinnalla ja sitten kuvien toisella rivillä, miltä näytti veden alla.
Sukeltajan kesti hetken tottua navigaattorin ohjaukseen ja hetken myös yhteys oli poikki paikannuksessa, johtuen sukeltajien aiheuttamasta katveesta poijujen ja sukeltajayksikön välillä. Kohteet löytyivät kuitenkin vaivatta ja paikannuksen tarkkuus oli jopa odotettua parempi: viistokaikulaitteilla määritellyt sijainnit löytyivät metrin tarkkuudella siitä mihin UWIS ne osoitti.




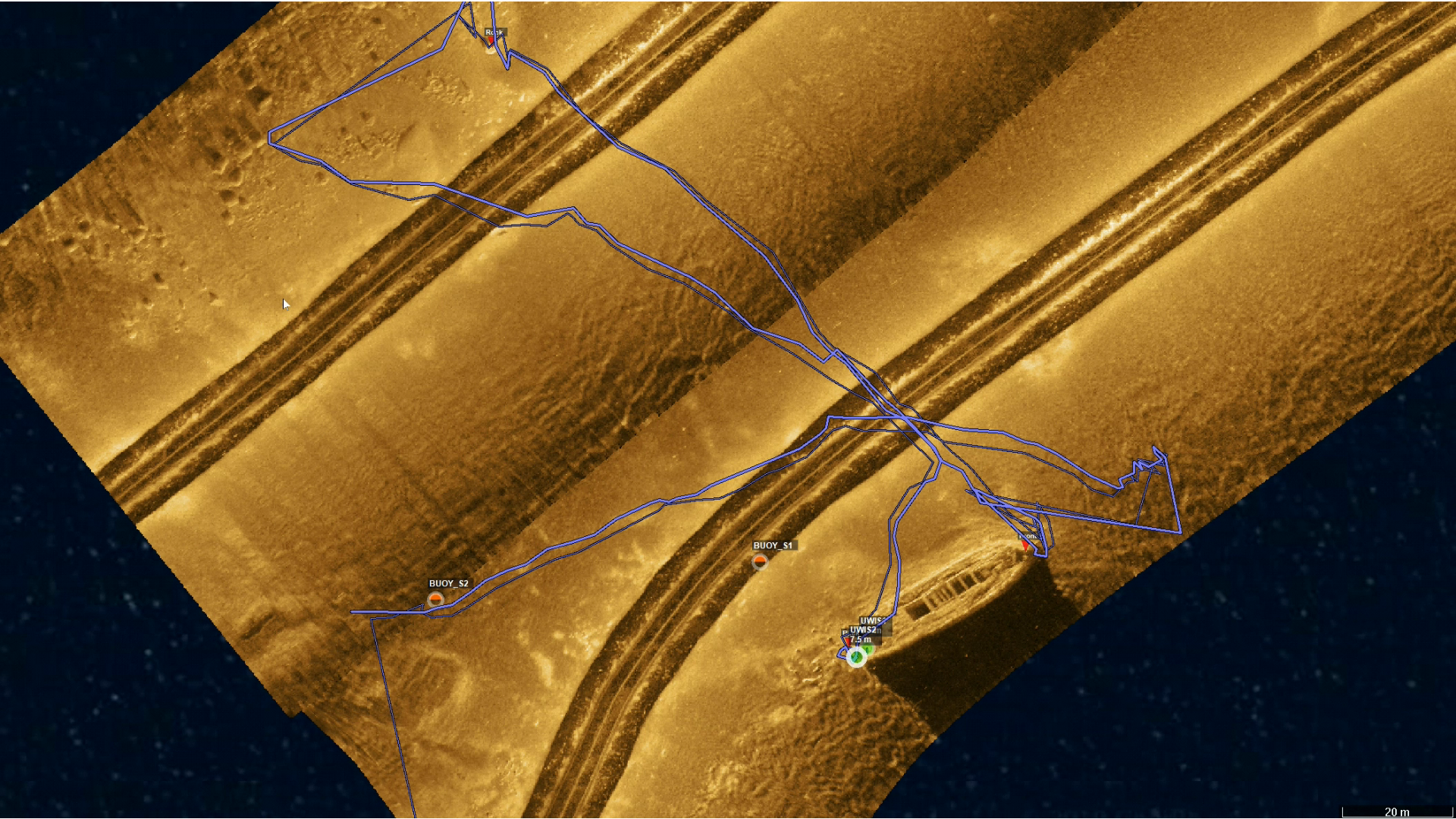
Tässä näkymä DeepView ohjelmasta sukelluksen lopulla.
Siinä näkyy UWIS poijut ja sukeltajat reaaliaikaisesti, sukelletut reitit ja kohteet. Sukeltajat kävivät pinnalla kaksi kertaa, jolloin kuvassa näkyy sen aikaisetkin siirtymät vedessä.
Harjoituksessa testattiin myös UWIS:n dynaamisen merkin käyttöä siten, että sukeltajlle siirrettiin yhtä kohdemerkkiä kesken sukelluksen. Tämä on kuvattu videossa (linkki aiemmin tällä sivulla).
Viistokaikulaitteiston ja UWIS:n yhteistyö on tehokas työkalu vedenalaisessa työssä ja etsinnässä.
UWIS sukeltajayksikön voi asentaa myös ROV:n päälle, jolloin sitä voidaan ohjata viistokaiku-kuvassa. UWIS Tracker ohjelman sisältävästä tietokoneesta voi myös jakaa yhden sukeltajayksikön sijainnin NMEA koodina (kuten ulkoinen GPS) muihin ohjelmistoihin.
UWIS tarjoaa siis kustannustehokkaan ja laiteriippumattoman ohjausjärjestelmän rovien ohjaamiseen.
Katso testivideo täältä:
Test DeepView ROV UWIS