UWIS sukellus: Pelastusharjoitus, jossa Alltab ja ROV
UWIS mukana pelastusharjoituksessa, jossa mukana ROV & Alltab
(DLRG Pöcking - Starnberg e.V., Saksa)
Tehtävä: Seurata sukelluksia sektorietsinnän aikana ja tallentaa ne, suorittaa etsintä käyttäen Alltab tablettia ilman köysiohjausta (turvaköysi oli käytössä) sekä testata UWIS:n käyttöä pienen vedenalaisen rovin (ROV) kanssa.
Katso video täältä:
UWIS DLRG
Harjoitus toteutettiin paikallisen pelastustoimijan (DLRG) kanssa kuvankauniilla järvellä lähellä Muncheniä, Saksassa.
Ensiksi esittelimme UWIS järjestelmää teoriassa ja suunnittelimme kahden päivän ohjelman. Tarkoitus oli ensin seurata sektorietsintää ja oppia käyttämään vedenalaista tablettia sekä asentaa UWIS sukeltajayksikkö rovin päälle.
Ensimmäisen päivän oppien tukemana suoritimme toisen päivän aluksi etsintätehtävän, jossa käytettiin sukeltajan ohjaukseen vain Alltabin navigointi-ohjelmaa, Valtamer Navigator for UWIS. Tämän jälkeen lähdettiin etsimään rovilla kohdetta, joka oli havaittu aiemmin suoritetuissa viistokaikumittauksissa.
Veden lämpötila oli 15 astetta, näkyvyys noin 7 metriä ja sukellusten syvyys enimmillään 10 metriä. Rovi kävi 15m:ssä.
Alla on kuvia sektorietsinnästä. Köysiohjaus tapahtui laiturilta käsin.
 Panasonic Toughbook, jossa UWIS Tracker ohjelma.
Panasonic Toughbook, jossa UWIS Tracker ohjelma.
 Näkymä UWIS Tracker:sta
Näkymä UWIS Tracker:sta
 ohjelmassa.") Reittiloki Google Earth (KML) ohjelmassa.
Reittiloki Google Earth (KML) ohjelmassa.
Lähes poikkeuksetta etsintäsukellukset suoritetaan käyttäen köysiä osoittamaan sukeltajille etsintäkuviot. Tässä harjoituksessa kokeiltiin vedenalaisen tabletin soveltuvuutta reitin suunnitteluun ja toteutukseen. Turvaköysi oli toki käytössä mutta sitä ei käytetty aktiivisesti.
Valtamer Navigator for UWIS ohjelmaan talletettiin kahdeksan reittipistettä, joiden kautta sukeltajan oli määrä sukeltaa. Suunniteltu reitti muodosti lähes suorakaide-etsinnän mukaisen kuvion. Sukeltaja vaihtoi aina reittipisteen saavutettuaan seuraavan reittipisteen kohteekseen, jolloin ohjelma ohjasi hänet perille näyttäen suuntaa ja etäisyyttä pisteeseen. Tämä ei varmaankaan olisi ollut välttämätöntä koska sukeltaja näki koko ajan kulkemansa reitin ja kompassin suuntiman suhteessa reittipisteisiin.
Pinnalla seurasimme sukellusta UWIS Tracker ohjelmalla, johon oli tallennettu vain alueen neljä kulmapistettä.
Alltab tabletti saa tietonsa bluetooth yhteyden avulla UWIS sukeltajayksiköltä.
Alla on kuvia ja näytönkaappauksia harjoituksesta. Sukeltaja aloitti reittimerkistä 1. ja jatkoi aina 8. asti. Sukelluksen aikana lähetimme hänelle viestin "Go", joka näkyi tabletin ylälaidassa. Valkoinen kolmio navigaattorin kartalla osoitti kohdan, jossa sukeltaja ensimmäistä kertaa saavutti yli yhden metrin syvyyden.
Tällä kertaa navigaattorin taustalla ei käytetty taustakuvaa mutta halutessaan sinne voi ladata minkä tahansa georeferoidun taustakuvan kuten satelliittikartan tai piirretyn kuvan. Etsintätehtäviä hyvässä näkyvyydessä voisi tukea mittakaavassa olevan rasterin lisääminen taustalle.
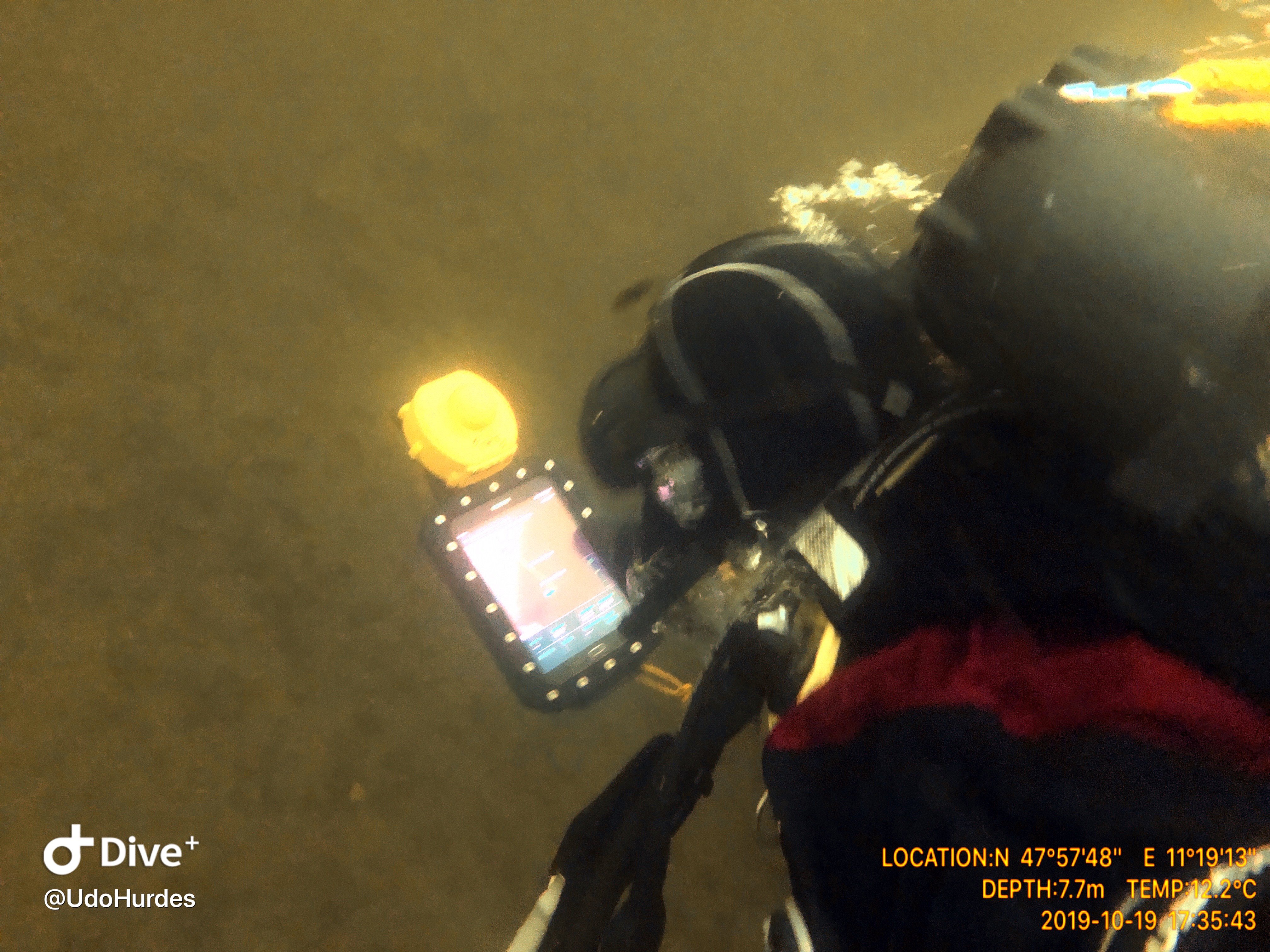
 Alltab sukeltajan silmin
Alltab sukeltajan silmin
 Valtamer Navigator for UWIS
Valtamer Navigator for UWIS
 Reaaliaikainen seuranta pinnalla.
Reaaliaikainen seuranta pinnalla.

Viiemeinen tehtävä oli löytää kohde, joka oli herättänyt kiinnostusta aiemmin suoritetuissa viistokaikumittauksissa. Tätä varten yksi UWIS sukeltajayksikkö kiinnitettiin pienen rovin päälle ja siten se saatiin seurantaan. Rovin paikkatieto ja syvyys saadaan ohjaajalle kahden sekunnin välein.
Pinnalla paikkatieto luettiin langattomasti PC:llä olevaan DeepVisionin DeepView 5.0 ohjelmaan, joka tukee suoraan UWIS järjestelmää.
Olimme lisänneet merkkipisteet kartalle, joissa uskoimme kohteen olevan. Seurannan avulla rovi ohjattiin käytännössä suoraan kohteeseen, joka osoittautui pieneksi jollaksi. Ilman rovin sijainnin seurantaa tämä olisi ollut todennäköisesti hyvinkin vaikeaa pelkällä videokuvalla.
 Etsintä suoritettiin veneestä
Etsintä suoritettiin veneestä
") DeepView (vihreä piste on ROV)
DeepView (vihreä piste on ROV)
 Rovin ohjaus, videokuva ja sijainnin näytöt
Rovin ohjaus, videokuva ja sijainnin näytöt
 Löydös
Löydös
") Viistokaiku- ja reittikuva (loki-tieto)
Viistokaiku- ja reittikuva (loki-tieto)
 Reitti Google Earth:ssa näyttää tehokkuuden.
Reitti Google Earth:ssa näyttää tehokkuuden.

Onnistuneen harjoituksen jälkeen - KIITOS DLRG!