UWIS sukellus: Etsintä ROV:a käyttäen
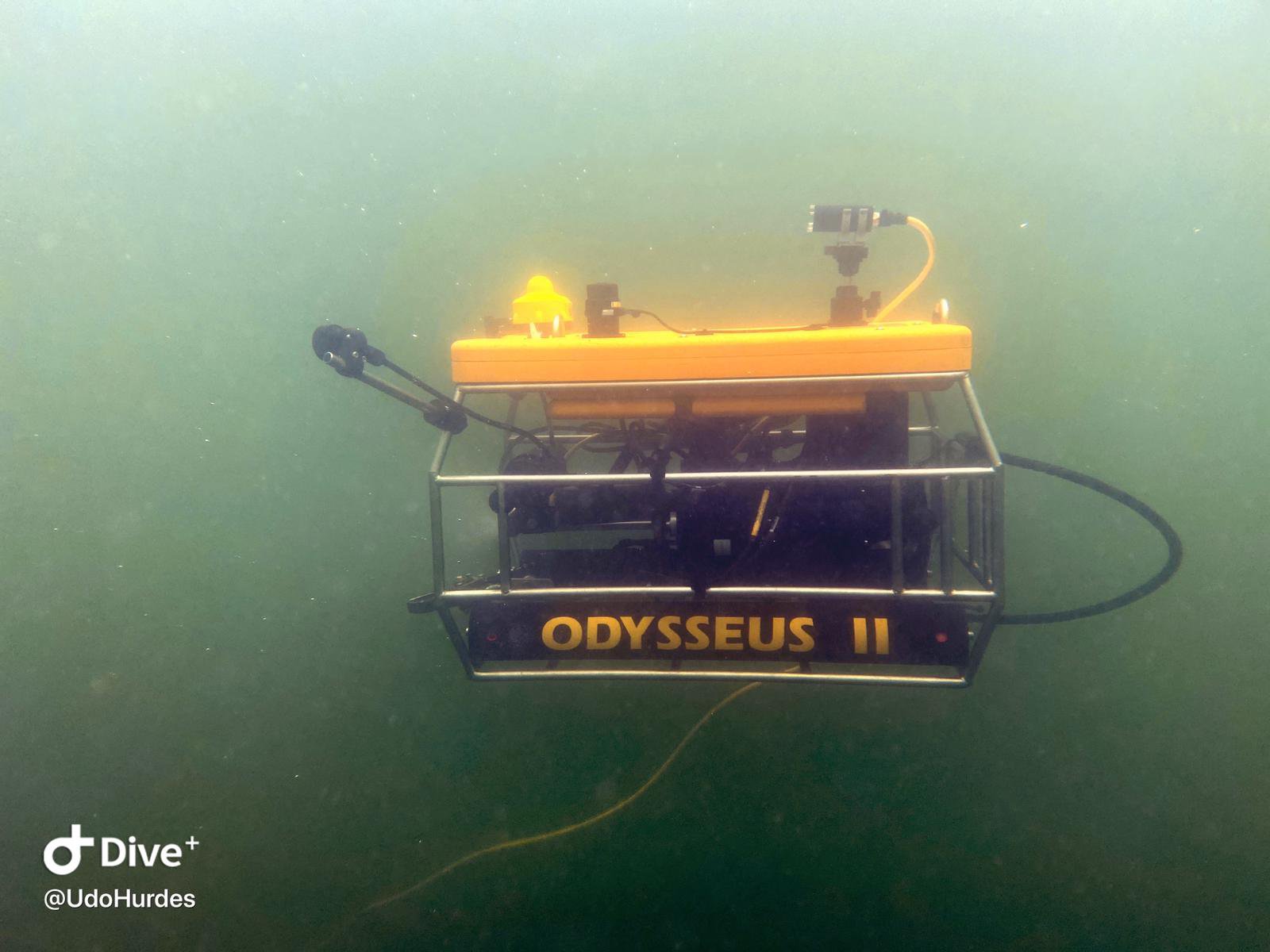
Kuva: Udo Hurdes
UWIS soveltuu hyvin ROV:n reaaliaikaiseen ohjaamiseen ja reitin todentamiseen.
(DLRG ja poliisi, Saksa sekä Wasserrettung, Itävalta)
Tehtävä: Seurata ja ohjata erilaisia ROV:a (3 kpl) asentamalla UWIS Sukeltajayksikkö niiden päälle. Seuraavina ohjelmina UWIS Tracker sekä DeepView 5.0.
Katso video täältä:
UWIS ROV
Aineistoa tälle sivulle syntyi kahdesta paikasta eli ensin Saksassa paikallisen pelastustoimijan (DLRG) päämajassa, järvellä lähellä Muncheniä sekä vastaavasti vesipelastusyksikön toimipisteellä Achensee järvellä Itävallassa.
Pienellä DLRG:n ROV:lla (FiFish V6) tarkoitus oli harjoitella sukeltajien ja ROV:n yhteistyötä kun taas Munchenin poliisi halusi testata miten UWIS soveltuu heidän jo iäkkäämmän ROV:n ohjaamiseen. Sama tilanne oli Itävallassa. ROV:ien mukana tulleet seurantajärjestelmät eivät olleet koskaan toimineet odotetusti ja olivat siksi pois käytöstä. Se teki ROV:ien ohjaamisen pelkästään videokuvan perusteella käytännössä lähes mahdottomaksi. Lisäksi laitteiden kompassit eivät olleet luotettavia.
Alla on kuvia siitä miten UWIS Sukeltajayksiköt kiinnitettiin ROV:hin. Paras paikka sille on näkyvin paikka UWIS poijuihin nähden ja niin, ettei siinä ole kiinteää pintaa aivan lähellä (n. 30 cm) yksikön "näkökentässä".


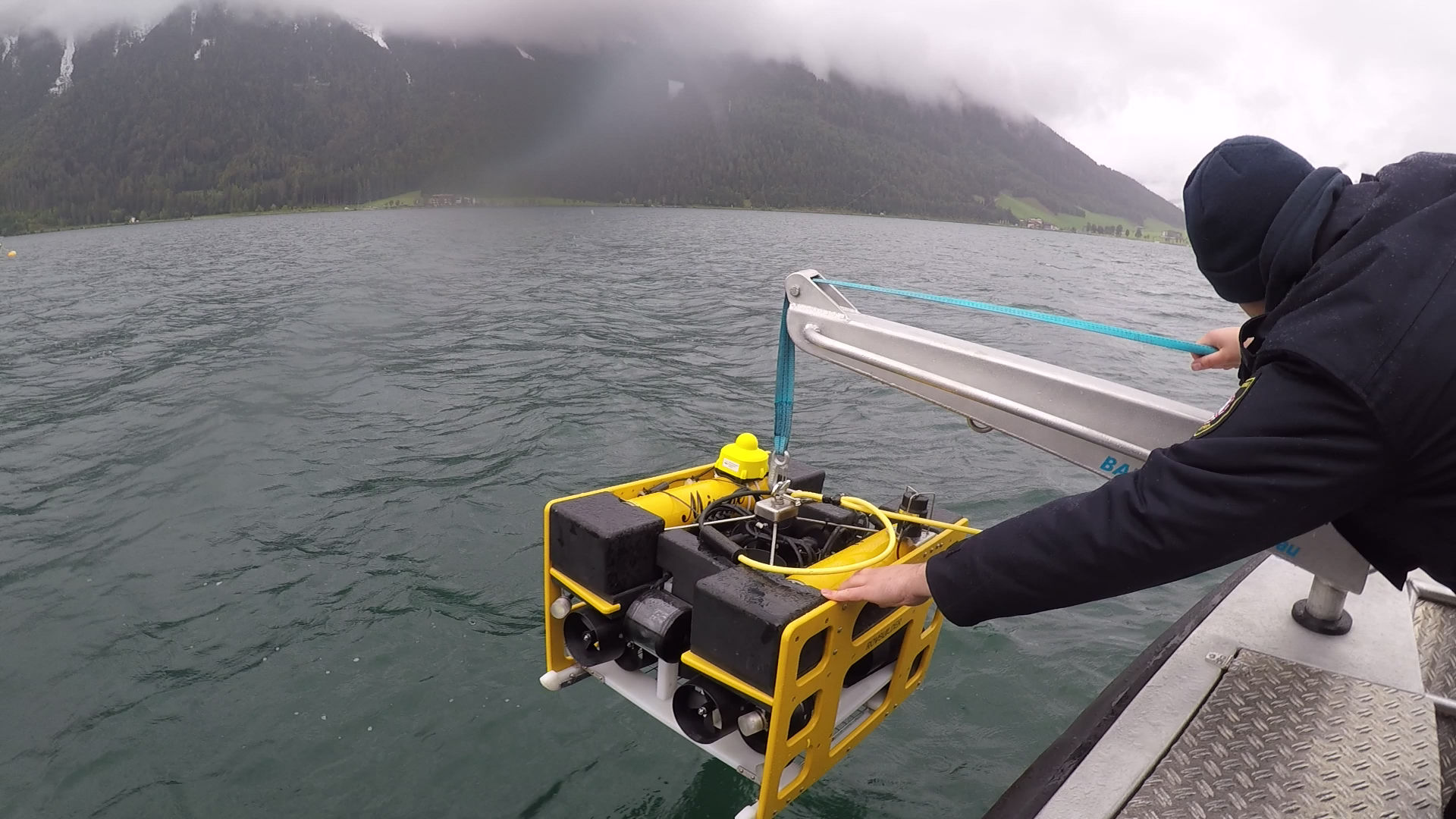
UWIS poijut levitetään n. 30-70m etäisyydelle toisistaan, mahdollisimman tasaiseen kolmioon siten, että Master-poiju on lähimpänä seuraavaa tietokonetta. Painoksi riittää n. 2-3kg puntti. Suosittelemme kelan käyttöä, jossa on n. 2-3mm vahvuista narua ja jossa on pikakiinnitys poijua varten. Silloin poijujen asennus ja poistaminen eivät vie juurikaan aikaa. Vain jos operoidaan syvällä ja virtaavassa paikassa voi olla tarpeen lisätä kelluvuutta UWIS poijujen rinnalle, jotteivat ne painu veden alle.



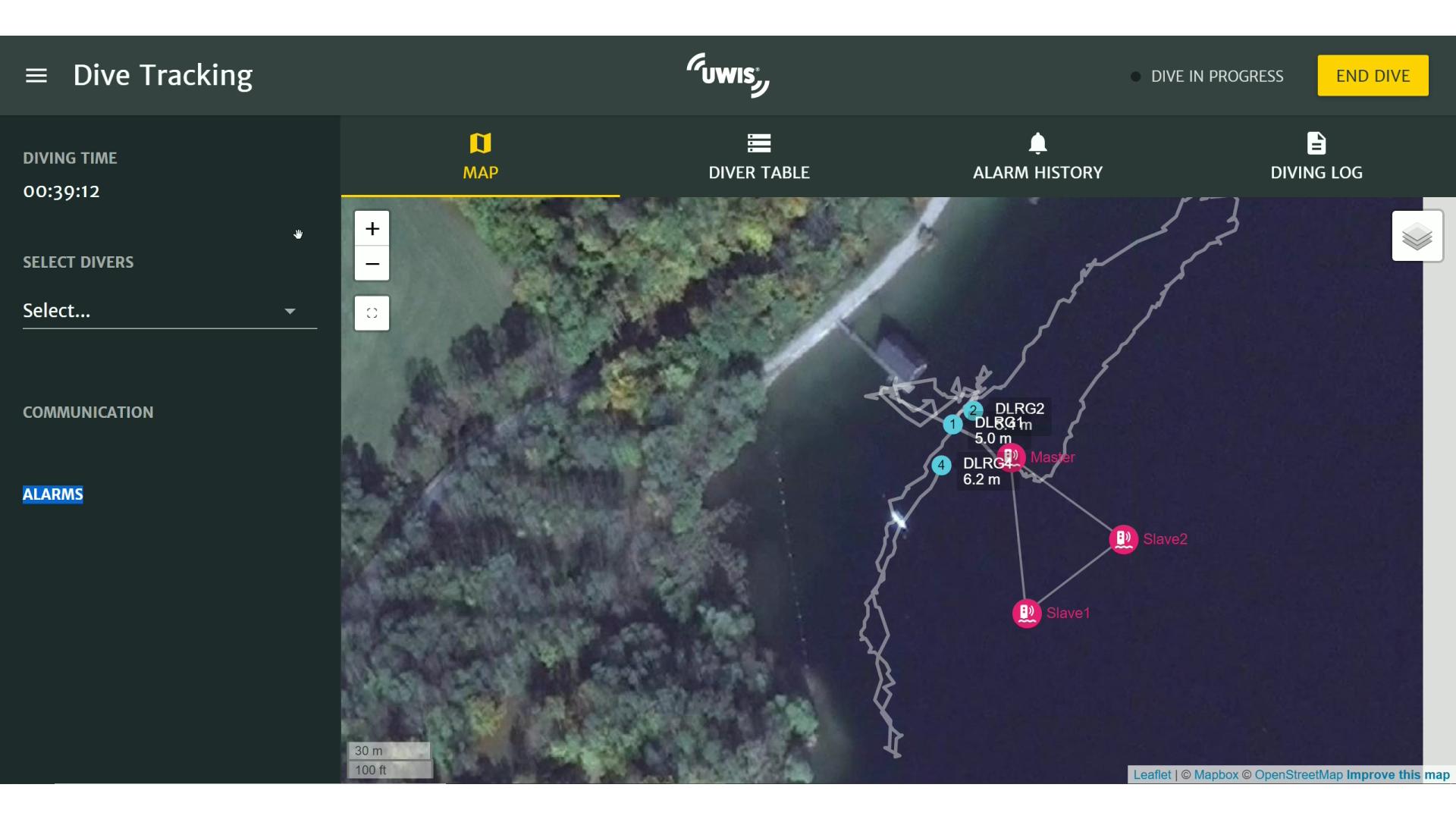
Kuvassa näkymä UWIS Tracker ohjelmasta tilanteessa, jossa kaksi sukeltajaryhmää palaa pidemmältä reitiltään ja ROV löytää heidät.
Seuranta-asetuksilla UWIS pystyy tarjoamaan paikkatiedon joka toinen sekunti (2s/yksikkö) sekä syvyyden. Ohjelmasta voi siirtää myös yhden UWIS Sukeltajayksikön paikkatiedon sarjaporttia käyttäen toiseen tietokoneeseen (NMEA, GGA). Jos tässä tietokoneessa on esim. ROV ohjausohjelmisto, joka tukee ulkoisen paikkatiedon tuontia, kuten ulkopuolinen GPS, niin ROV saadaan näkymään siihenkin.
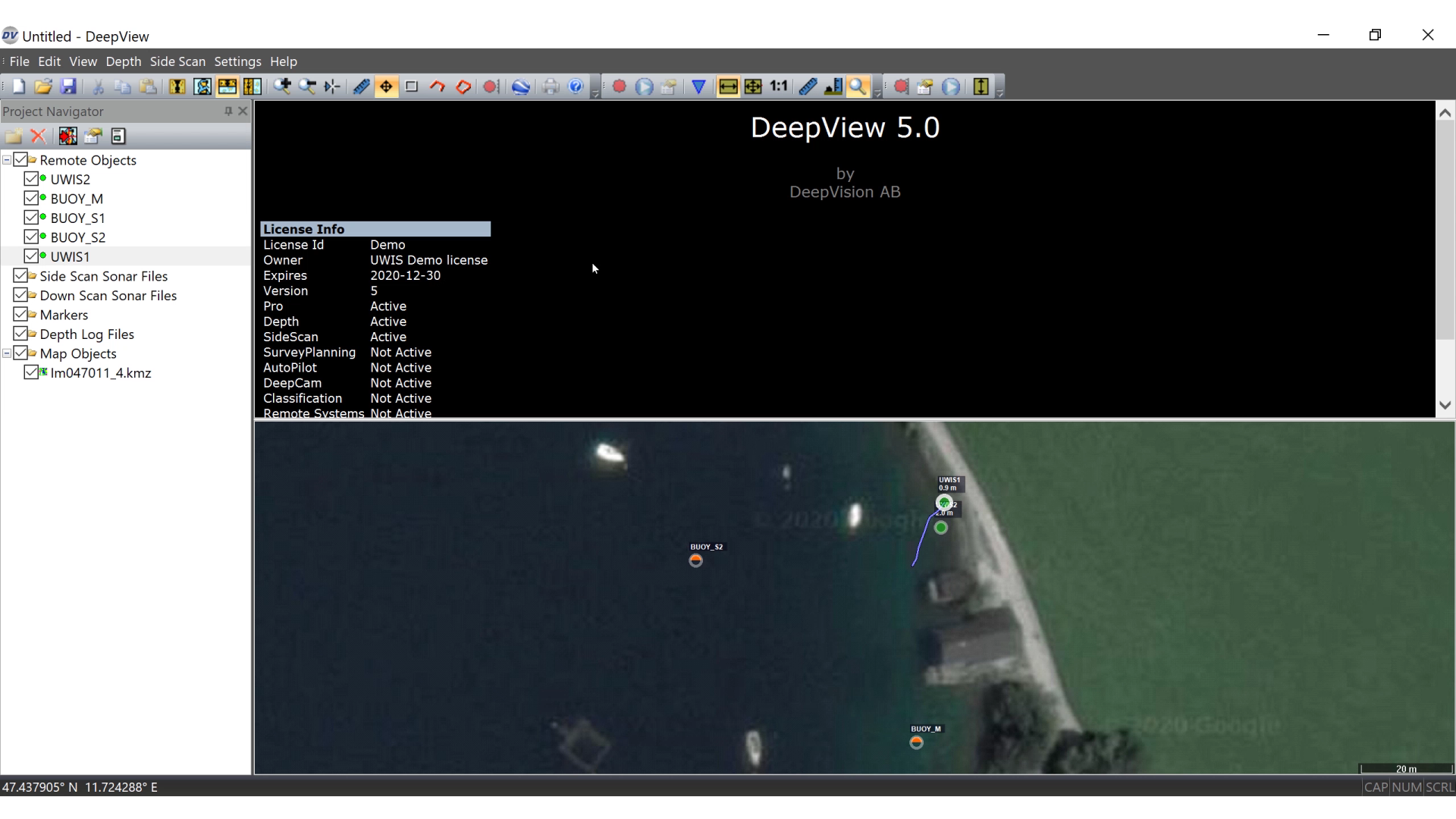
Reaaliaikaista seurantaa voidaan toteuttaa myös DeepView ohjelmalla, johon on yhteistyössä kehitetty kyky kuunnella UWIS poijuviestejä langattomasti.
ROV:n operoija voi käyttää joko juuri viistokaiutettua tai aiemmin nauhoitettua kuvaa pohjalla ohjatessaan ROV:a kohteisiin. Tässä esimerkkikuvassa ei ollut lainkaan viistokaikukuvaa tarjolla, joten latasimme Google:n satelliittikuvan taustalle. Reittiviivan piirto ja tallennus käynnistettiin vain aivan sukelluksen lopuksi.
Alla on kuva ohjaamosta ja ROV:sta tositoimissa. Asentamalla UWIS:a varten ulkoisen wifi-antennin päästään operoimaan alusten sisällä ja etäisyys UWIS poijuihin voi olla selkeästi pidempi kuin pelkästään tietokoneen omaa wifi:ä käyttäen.



Ohessa Google Earth ohjelmaan tuotu reitti ROV sukelluksesta. Pienellä harjoittelulla ja toimivalla kompassilla etsintä voidaan suorittaa hyvinkin systemaattisesti toisin kuin tässä tällä kertaa.
UWIS Tracker ohjelma kerää sukellusreitit talteen ja kuten tässä, reitit voi lukea myös UWIS poijusta jälkikäteen, jolloin käytössä on kaikki se tieto mitä sukelluksen aikana on kertynyt.
UWIS järjestelmän edut suhteessa muihin markkinolla oleviin seurantajärjestelmiin:
- Langaton järjestelmä
- Mahdollistaa myös vedenalaisen navigoinnin samaan aikaan
- Sietää vaikeita akustisia olosuhteita ja toimii siten mm. louhoksilla, satamissa ja lämpökerrostumien läpi
- Kustannustehokas ja tarkka paikannus
- Riippumaton seurattavasta laitteesta
- Toimii yhteen DeepView viistokaiku-ohjelmiston kanssa.
