UWIS sukellus: Merenpohjan kartoitus ja seuranta
UWIS on ammattilaisen työkalu merenpohjan kartoittamisessa ja seurannassa.
Tehtävä: Esittelimme UWIS:n käyttöä ROV:lla ja sukeltamalla tapahtuvissa merenpohjan kartoitus- ja seurantatehtävissä. Paikkana Itämeri ja isäntänä Metsähallitus, Luontopalvelut.
Katso videot täältä:
Metsähallitus Parks & Wildlife Finland, Metsähallitus Marine habitat mapping and monitoring
Saimme mahdollisuuden esitellä UWIS järjestelmän käyttöä Metsähallituksen ammattilaisille heidän kenttätyössään. Ensimmäinen, demoluonteinen reissu, oli Ulko-Tammion kansallispuiston alueella ja toinen, jo työolosuhteita mukaileva testi, oli Sandkallan riutoilla, Porvoossa.
Tavoitteena oli jalkauttaa UWIS:n tuomat hyödyt heidän kenttätyöhönsä. UWIS järjestelmää käytettiin mm:
- ROV:n ohjaukseen
- Sukeltajan navigointiin, viestintään ja havaintojen merkintään hyvin matalassa vedessä
- Paikkatiedon hyödyntämiseen ROV:lla otetuilla videoilla.
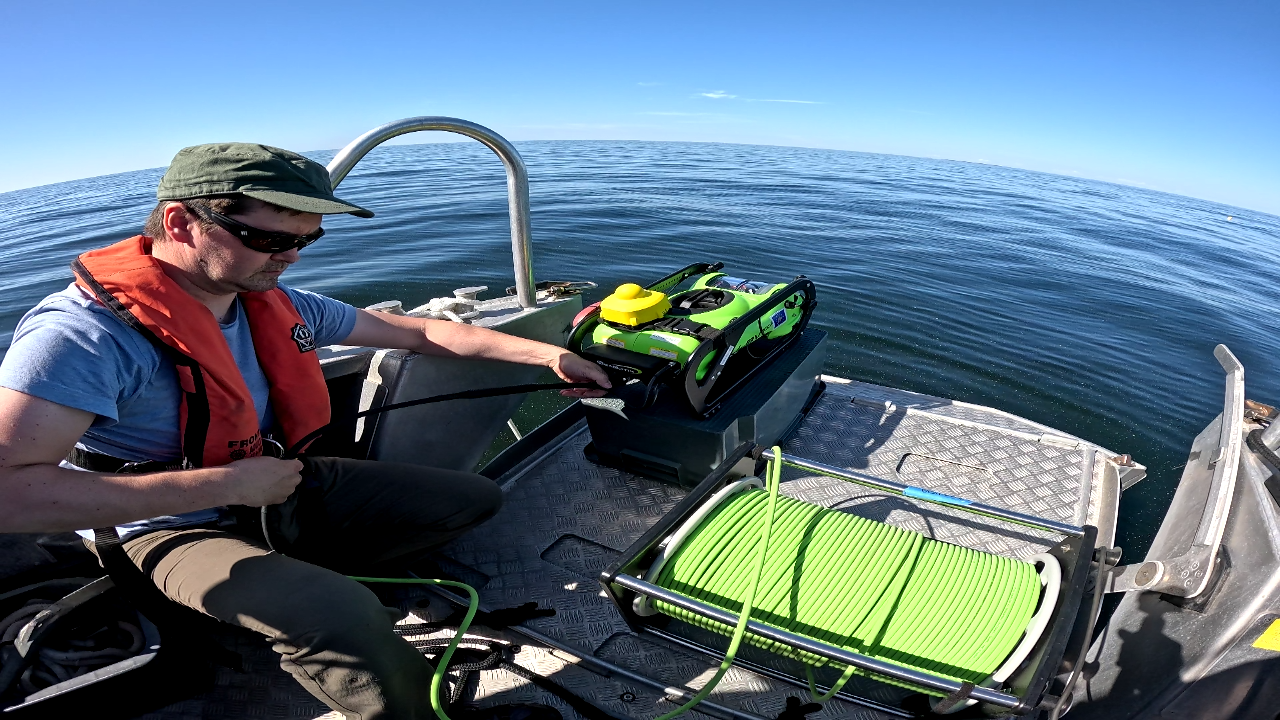
Ensimmäisen ROV-sukelluksen antia oli mm. havainto miten hyvin UWIS toimii hyvinkin matalassa vedessä, lähellä kallioita. Opimme myös, että vedessä UWIS sukeltajayksikön aiheuttama, noin 100g paino, tulee kompensoida kellukkein ROV:n ohjattavuuden optimoimiseksi.
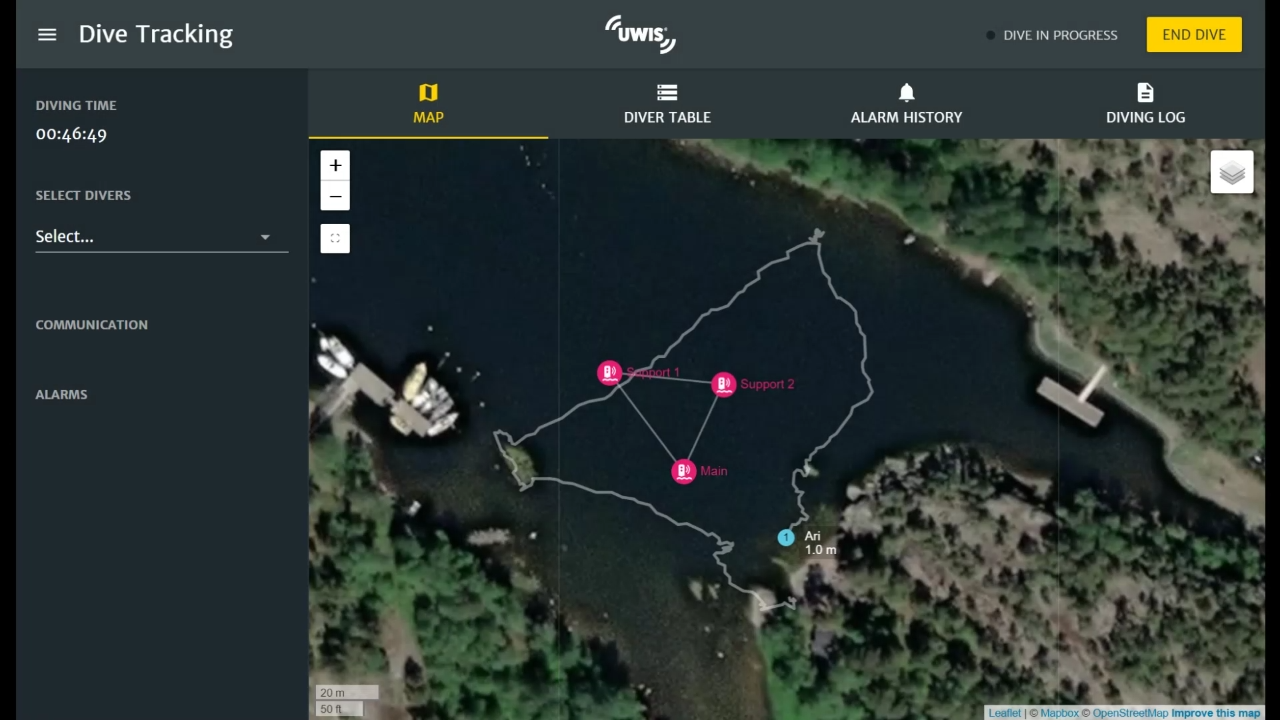
Alla olevissa kuvissa näkyy UWIS:n laitteiden sijoittelua. Poijut ankkuroitiin merenpohjaan käyttäen noin 3kg ankkureita ja sukeltajilta tuttuja riilejä.


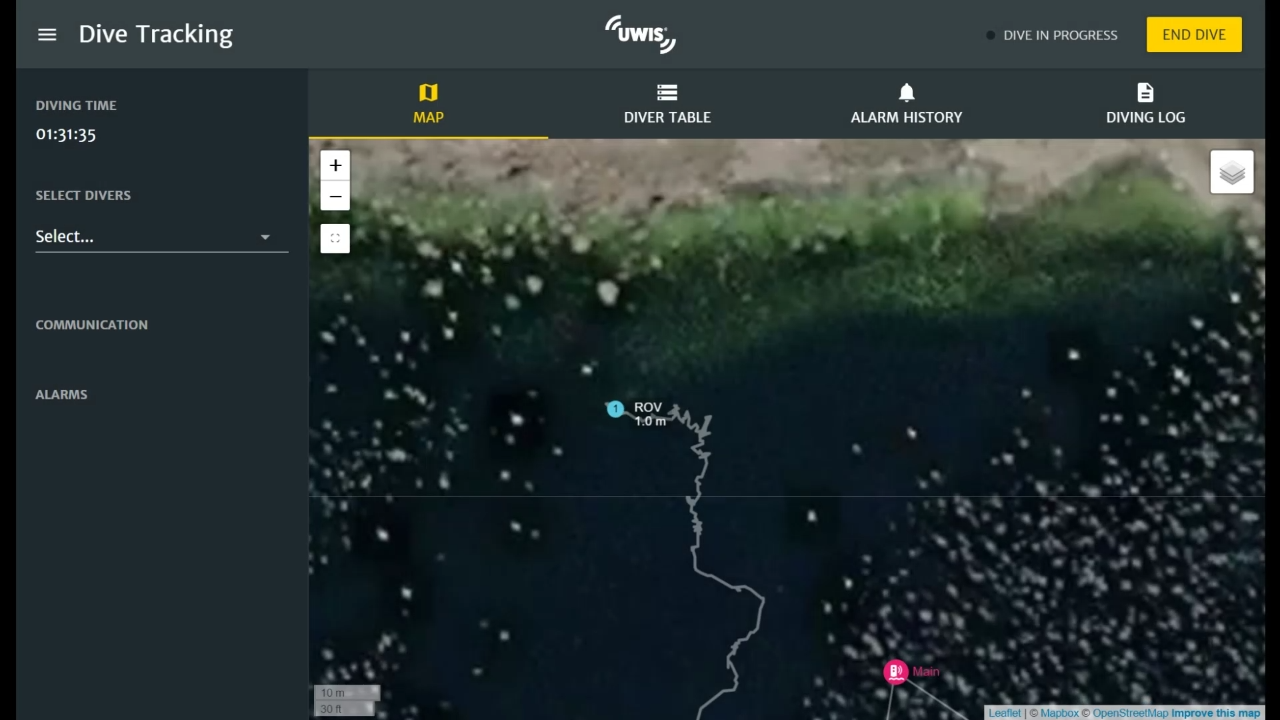
UWIS tuotti reaaliaikaista paikkatietoa UWIS Tracker ohjelmaan joka toinen sekunti, jonka avulla käyttäjä pystyi ohjaamaan ROV:n haluttuun paikkaan. Alla olevista kuvista ensimmäisessä näkyy miten tarkka ja rauhallinen reitti saavutetaan vaikka mitattava kohde on etäällä poijuista ja hyvin matalassa vedessä, kivien seassa.
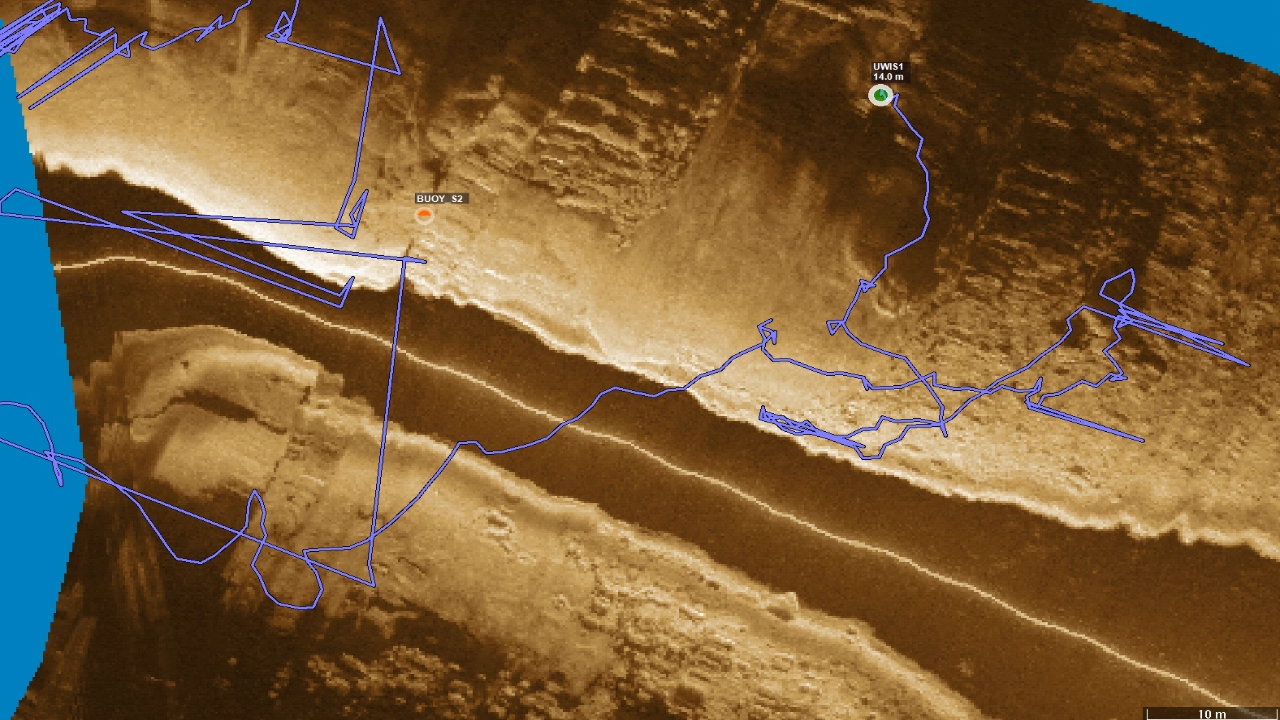
Toisessa kuvassa käytimme DeepView ohjelman kykyä näyttää UWIS sukeltajayksikön sijainnin suoraan viistomosaiikin päällä. Kohteena olleet kivirykelmät löytyivät vaivatta.
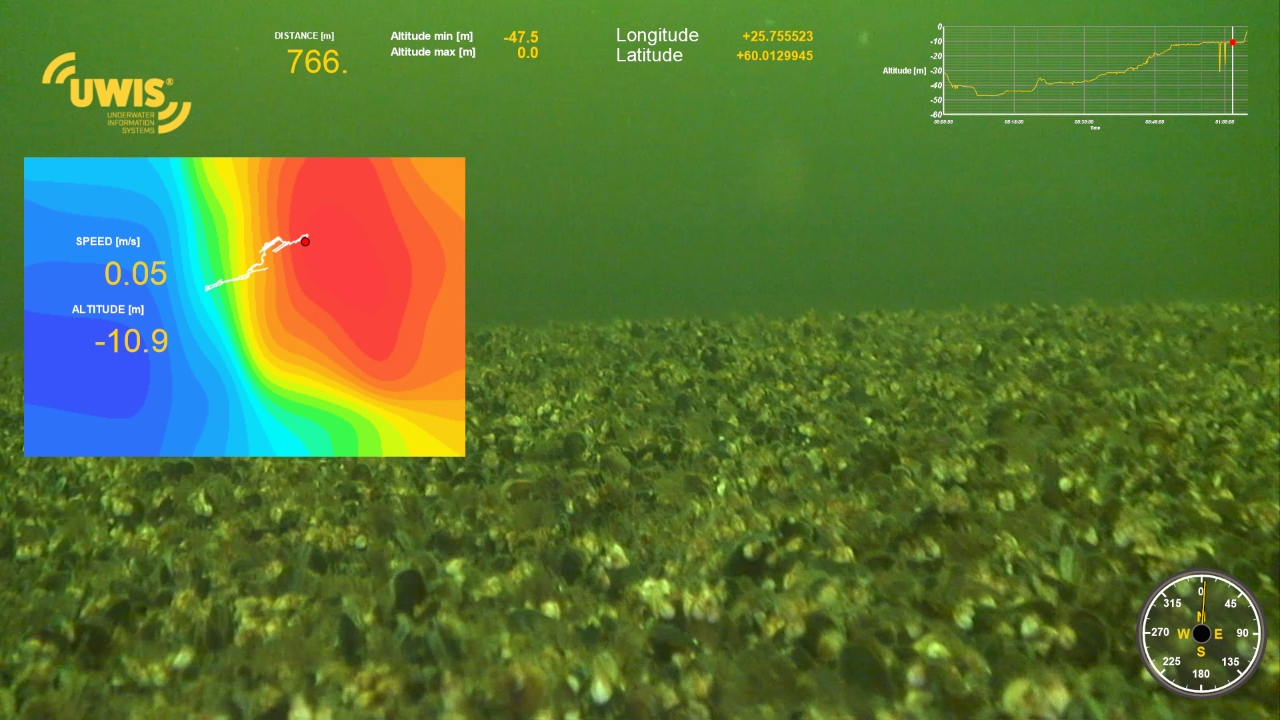
ROV:lla tallennettuun videoon voitiin myöhemmin liittää Dashware-ohjelmalla UWIS laitteiden data haluttuihin mittareihin ja osoittimiin. Tarvittava synkronointipiste aikaleimoilla varustettuihin datapisteisiin löytyi seuraamalla esimerkiksi ROV:n pintaannousuhetkeä. Oheisessa kuvassa ROV:n reitti on lisäksi sijoitettu edellisenä päivänä itse kaikuluotauksella tehtyyn syvyyskarttaan.
Videolla näkyvä data ja mittarit:
- koordinaatit
- syvyys (reaaliaikainen, min ja max)
- kuljettu matka ja nopeus
- kulkusuunta
Näillä kerroilla ei vastaavaa tutkimusta tehty sukeltamalla mutta UWIS haluttiin laittaa todelliseen tulikokeeseen snorklaamalla matalassa vedessä, ympäri kivikkoisen lahden. Onhan tällainen ympäristö tunnetusti haasteellinen akustisille laitteille.
Alla kuvia tästä erittäin onnistuneesta testistä. Sukeltaja käytti vedenalaista tablettia (Alltab) paitsi navigoimiseen myös viestintään rannalla uintia seuranneiden kanssa. Hän myös merkitsi havaintojaan merkeiksi karttaan löytääkseen ne uudelleen ohjelman tarjoaman ohjaustoiminnon avulla.