UWIS dive: Side scan sonar
UWIS and DeepVision side scan collaporation in Karlskruna, Sweden.
Mission: Deliver UWIS to the Swedish Defense Forces and conduct training and practice sessions in collaboration with a DeepVision representative. The goal was to integrate UWIS with DeepVision’s side scan sonar and its DeepView software for effective underwater navigation and exploration.
Watch the video here:
Sonar & UWIS
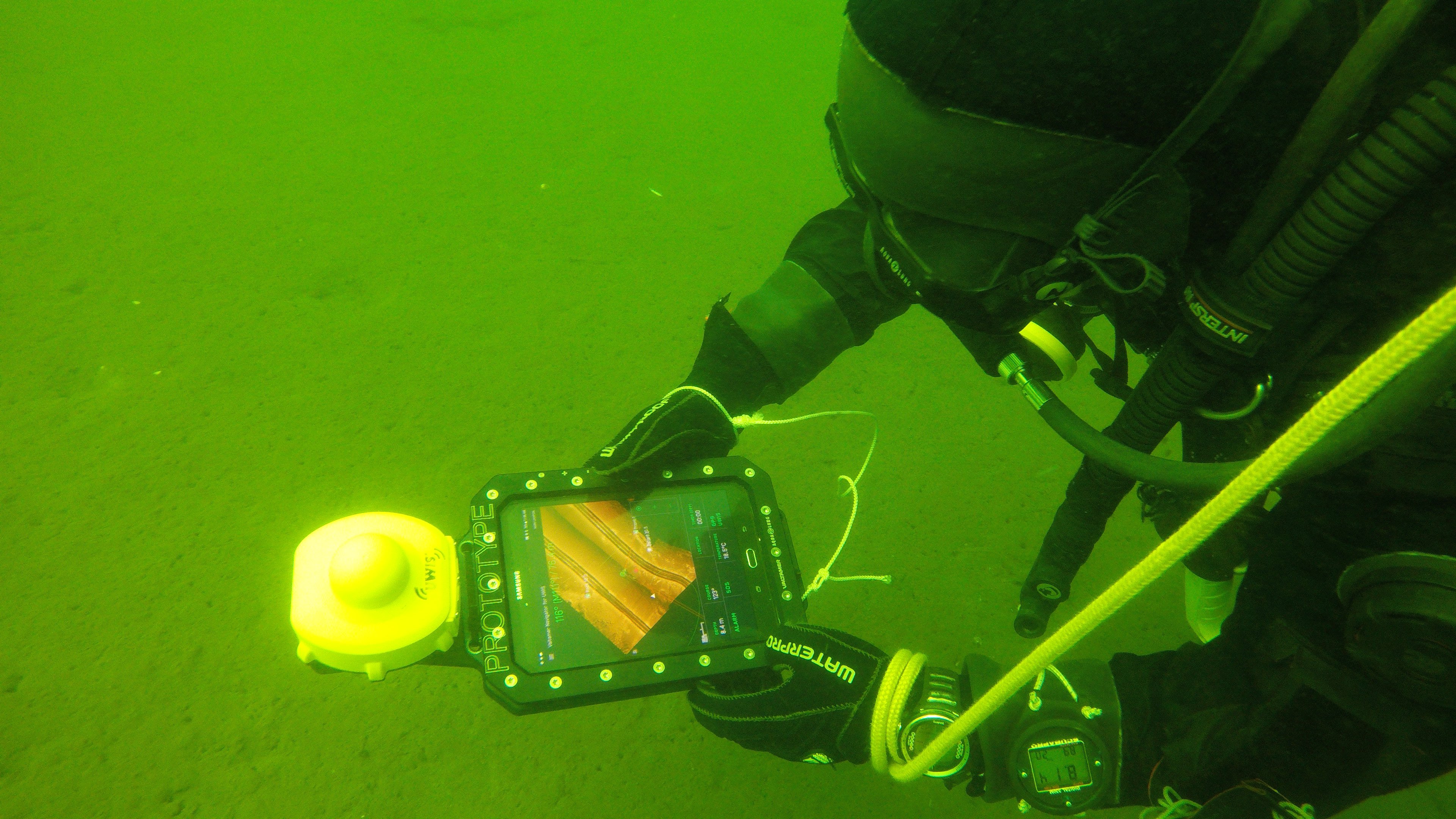
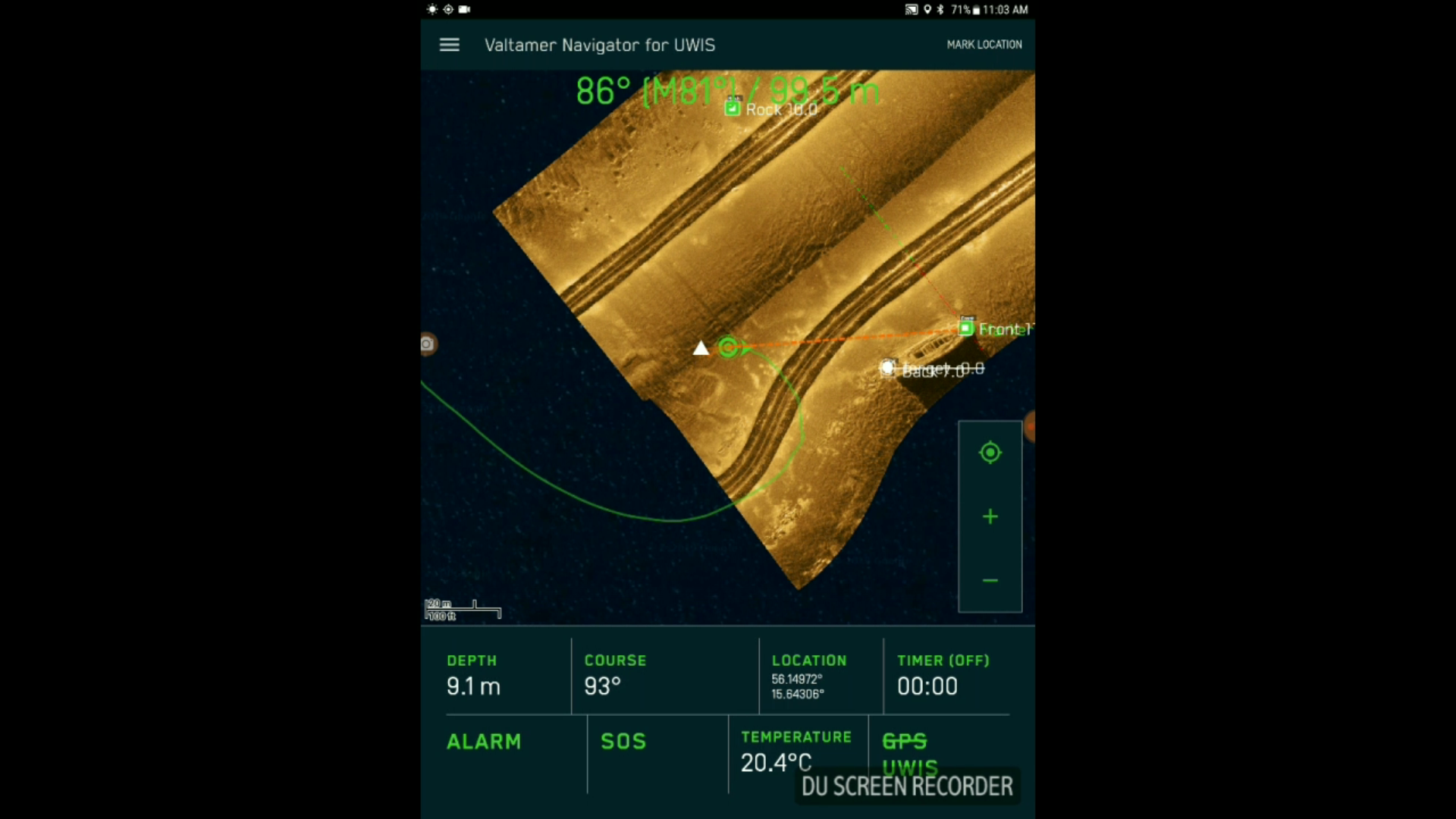
During the initial boat trip, a DeepVision representative provided guidance on maximizing the potential of their side scan sonar systems. Their DeepView software saves sonar findings as geo-referenced images, which can then be used as overlays in the Valtamer Navigator for UWIS software on an Alltab underwater tablet.
Conditions:
- Water temperature: ~17°C
- Visibility: ~6 meters
- Maximum dive depth: ~10 meters
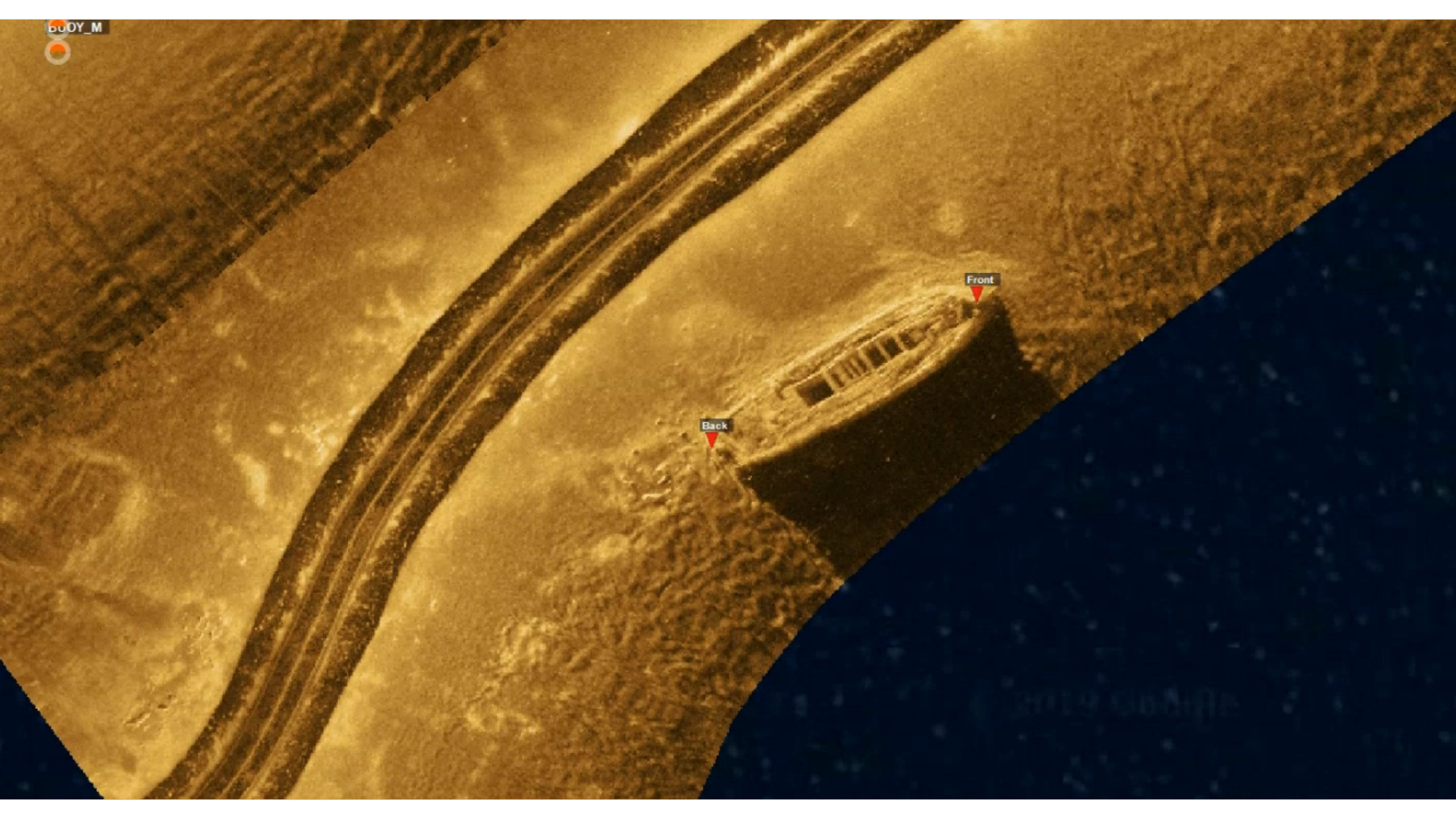
The side scan sonar was used to identify three illustrative objects on the seafloor. These were then saved as geo-referenced targets and transferred to the Valtamer Navigator for diver navigation. To increase the challenge:
- Divers were dropped 100 meters away from the first target.
- The targets were spaced at least 80 meters apart, requiring divers to rely on the navigation system for precise location.
Without navigation assistance, finding these targets in low visibility and over such distances would have been nearly impossible.
The dive tested the integration of UWIS and sonar guidance. Initially, divers took time to adapt to the navigation system. Brief signal interruptions occurred due to shading caused by divers between the UWIS buoys and the diver unit. However, the targets were ultimately found with ease, and positioning accuracy exceeded expectations: objects identified by the side scan sonar were located within one meter of the predicted positions.




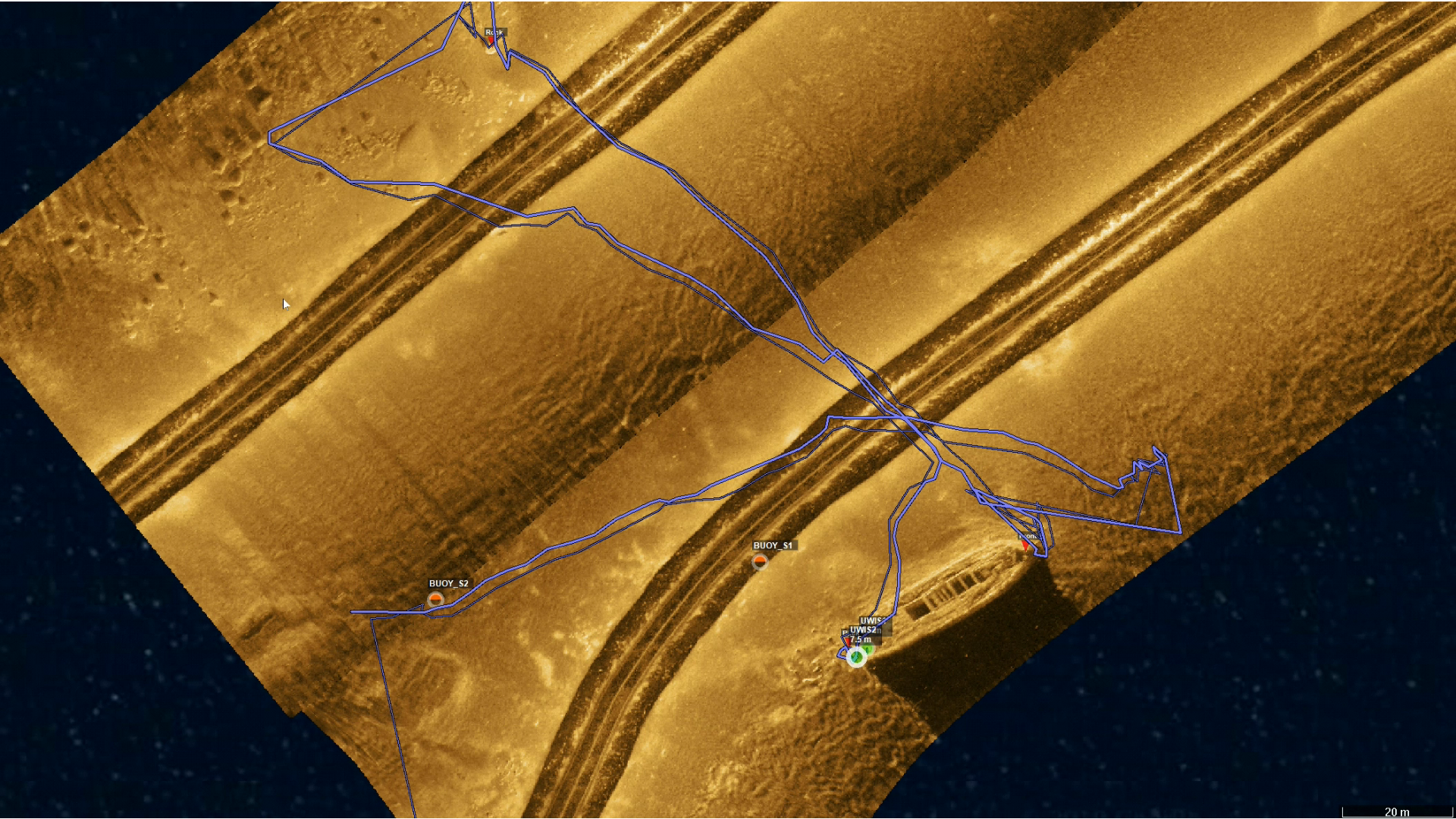
The final dive view from DeepView showcased:
- Real-time UWIS buoy and diver locations.
- Diver routes and transitions between surface and underwater phases.
- Accurate positioning of targets, even with dynamic mark adjustments during the dive.
Dynamic marks allowed the team to move target locations in real time, displaying updated targets on the diver's Alltab tablet during the dive. This capability, demonstrated in the video, highlights the flexibility and responsiveness of UWIS for underwater operations.
The collaboration demonstrated that UWIS is not only valuable for divers but also for controlling ROVs. By mounting a UWIS diver unit on an ROV, it becomes possible to navigate and position the ROV over sonar images. UWIS Tracker can transmit one diver unit’s location as an NMEA signal (similar to external GPS), enabling seamless integration with other software.
This setup provides a cost-effective and device-independent solution for ROV control, broadening UWIS’s applications in underwater exploration and operations.
Conclusion
The successful integration of UWIS with DeepVision’s side scan sonar and software underscores its potential as a powerful tool for underwater exploration, mapping, and navigation. UWIS enhances accuracy, efficiency, and adaptability for both divers and ROVs in challenging underwater environments.
Watch the test video here:
Test DeepView ROV UWIS