UWIS dive: Searching with ROV
Image: Udo Hurdes
UWIS System: an efficient tool for real-time ROV tracking and route verification
(DLRG and police, Germany; Wasserrettung, Austria)
Mission: Demonstrate the use of the UWIS System to track and control three different ROV models. The UWIS Tracker and DeepView 5.0 software were used for real-time tracking and navigation.
Watch the video here:
UWIS ROV
UWIS System in action during ROV testing with rescue and police teams in Germany and Austria.
Overview
Testing was conducted at two locations:
- The DLRG headquarters near Munich, Germany.
- The water rescue unit’s base on Lake Achensee, Austria.
The objectives included:
- Practicing cooperation between divers and an ROV (FiFish V6) for DLRG.
- Testing UWIS compatibility with older ROVs used by the Munich police and Austrian rescue teams.
Existing tracking systems for the ROVs had proven unreliable, with issues such as faulty compasses and ineffective video-only guidance. UWIS was introduced to resolve these challenges.
UWIS Diver Units were attached to the ROVs in locations with clear visibility to UWIS buoys and no solid surfaces within approximately 30 cm. This ensured optimal communication and tracking accuracy.


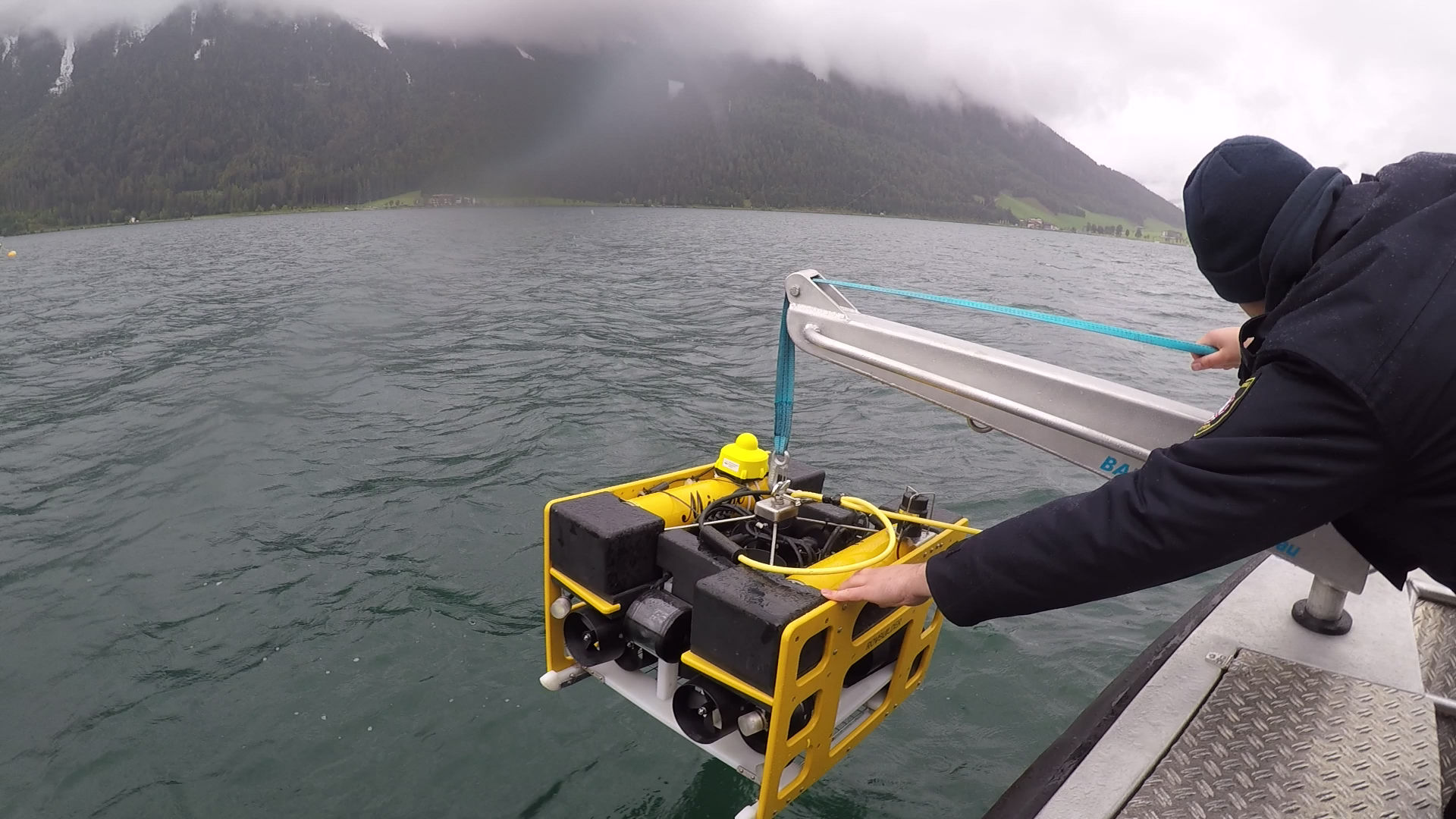
Buoy Placement:
- Buoys were arranged in an isosceles triangle, 30–70 meters apart, with the Master buoy closest to the tracking computer.
- Anchors of 2–3 kg were sufficient for stabilization.
- In deeper or high-current locations, additional buoyancy may be required to prevent submersion.



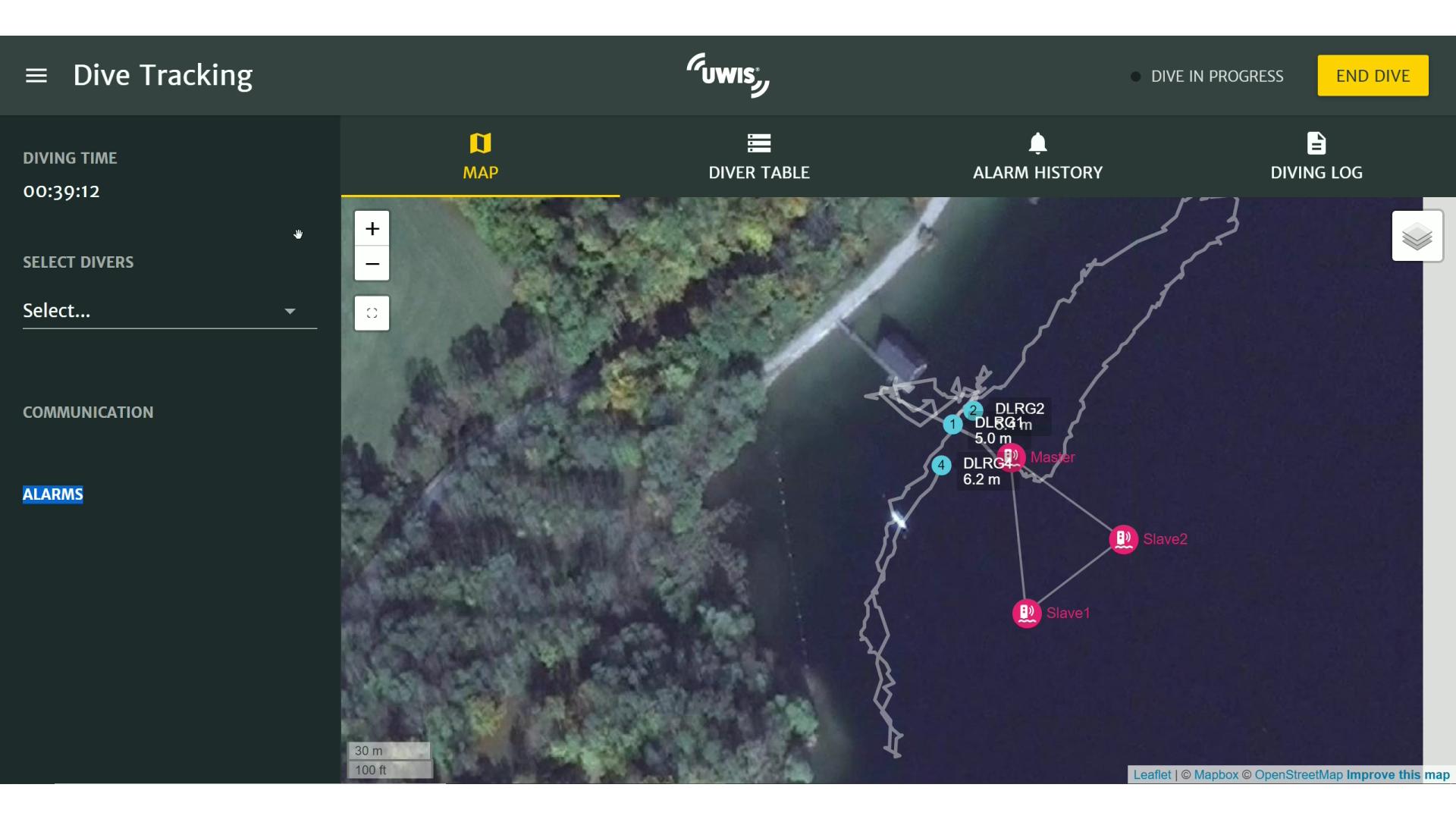
UWIS Tracker displaying diver and ROV locations during a search mission.
The UWIS Tracker provided real-time updates on location and depth every two seconds (2s/unit). This data could also be shared via a serial port as NMEA/GGA data for integration with other systems, such as ROV control software that supports external GPS input. This allows the ROV’s location to appear directly within compatible control interfaces.
DeepView software wirelessly integrated with UWIS buoy messages, enabling real-time monitoring. Operators could overlay sonar images or satellite maps to guide ROVs to targets. During this exercise, a Google satellite image was used as the background, as no fresh sonar images were available.
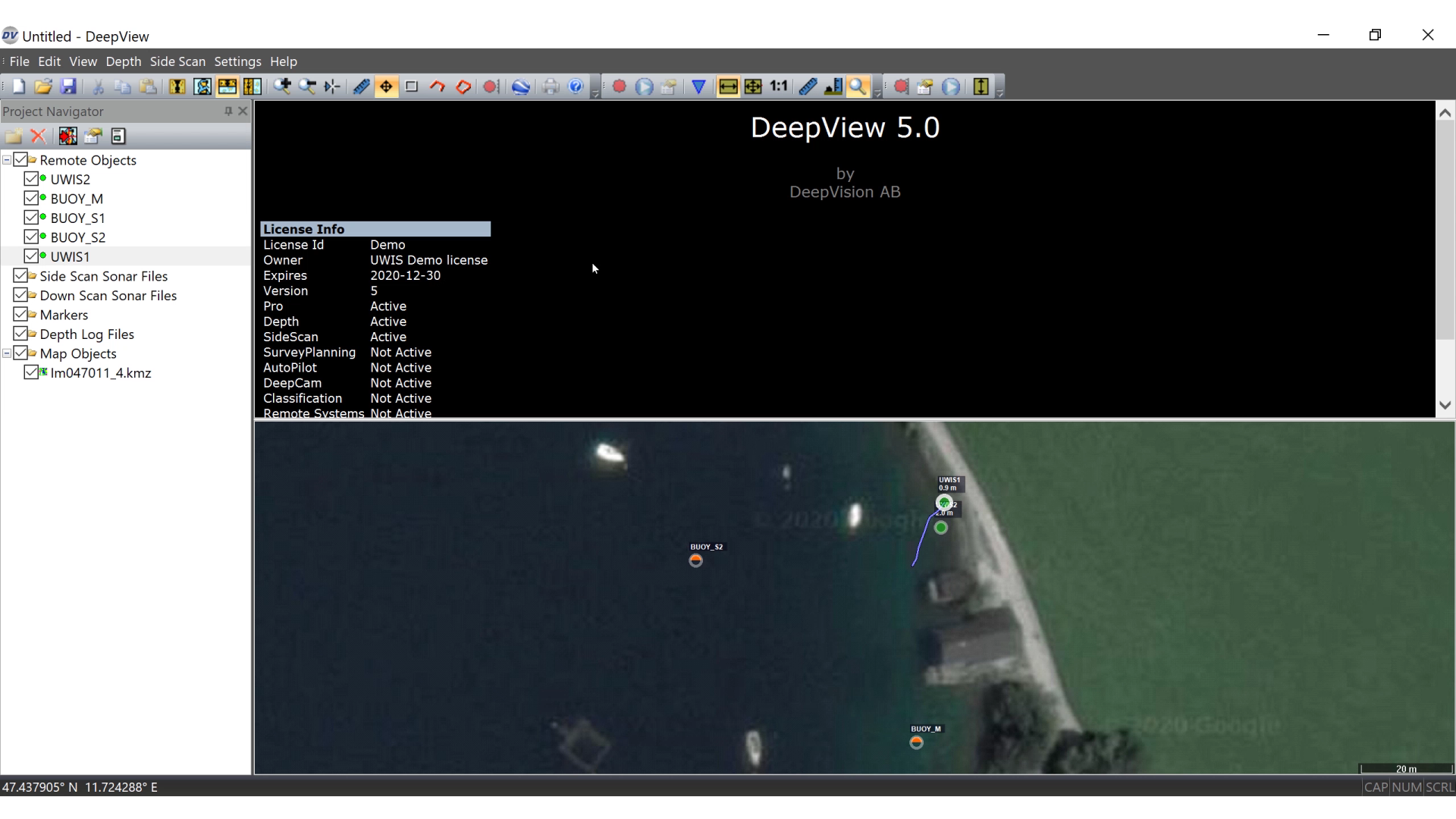
An external WiFi antenna allowed UWIS tracking to be monitored from inside the boat, increasing the effective range compared to using the computer’s built-in WiFi. UWIS’s tolerance for difficult acoustic environments made it effective even in challenging conditions such as quarries, ports, or waters with thermoclines.



ROV routes displayed on Google Earth for post-dive review.
UWIS collected all dive route data, which could be read from the buoys after the dive. This information was imported into Google Earth, enabling systematic route analysis. With practice and a working compass, search patterns can be executed far more systematically compared to manual methods.
Advantages of UWIS System Over Traditional Tracking Systems:
- Wireless Operation: Simplifies setup and eliminates cable reliance.
- Simultaneous Navigation and Tracking: Allows divers and ROVs to operate effectively together.
- Resilient Performance: Works reliably in acoustically challenging environments.
- Cost-Effective and Accurate: Provides high precision at a reasonable cost.
- Device Independence: Compatible with a wide range of ROVs and other underwater equipment.
- Integration with DeepView Software: Enhances functionality for underwater mapping and navigation.
Conclusion
The UWIS System demonstrated its versatility and effectiveness for real-time ROV tracking and underwater route verification, addressing the limitations of traditional tracking methods. Its adaptability and precision make it a valuable tool for rescue operations, underwater exploration, and scientific research.
