UWIS dive: SAR exercise with ROV & Alltab
UWIS in a Search & Rescue exercise with ROV & Alltab
(DLRG Pöcking - Starnberg e.V., Germany)
Mission: Track SAR divers during sector search dives, conduct a search using the Alltab underwater tablet without guide ropes (with a safety line) and test the use of UWIS with a small ROV.
Watch the video here:
UWIS DLRG
The exercise took place at DLRG's base on the picturesque Starnberger See near Munich, Germany.
The exercise began with an introduction to the UWIS system and the theoretical overview. The two-day plan included sector search tracking exercises, training with the Alltab underwater tablet, and equipping an ROV with a UWIS Diver Unit.
On the second day, after gaining insights from the first day’s activities, a rectangular search pattern was performed using the Alltab tablet and its navigation software, Valtamer Navigator for UWIS. The final task involved locating an object previously identified via side scan sonar, using UWIS to track a small ROV.
The water temperature was 15°C, visibility was about 7 meters, and the maximum depth was 10 meters for divers and 15 meters for the ROV.
Below are photos during sector sarch. Dives were carried out with rope guidance from the pier.
 Panasonic Toughbook with UWIS Tracker software
Panasonic Toughbook with UWIS Tracker software
 View from UWIS Tracker - real time tracking
View from UWIS Tracker - real time tracking
") Log in the Google Earth (KML)
Log in the Google Earth (KML)
Typically, search dives rely on guide ropes to establish a search pattern. This exercise explored the use of the Alltab tablet for route planning and dive control. The Valtamer Navigator software saved eight target markers, which the diver followed in sequence, forming an almost rectangular search pattern. After reaching each marker, the diver navigated to the next one using distance and direction cues provided by the tablet.
The surface team monitored the dive in real-time using UWIS Tracker software, which displayed the four corner markers set for the search. The Alltab received data via Bluetooth from the UWIS Diver Unit.
Below are photos and screenshots from this exercise.
The diver’s journey started at marker 1 and proceeded through to marker 8. A “Go” message was sent during the dive, and the white triangle on the Navigator map marks the diver's initial descent to 1-meter depth.
For this exercise, no overlays were used on the Navigator display. However, georeferenced images, such as satellite maps, custom maps, or drawings, can be incorporated.
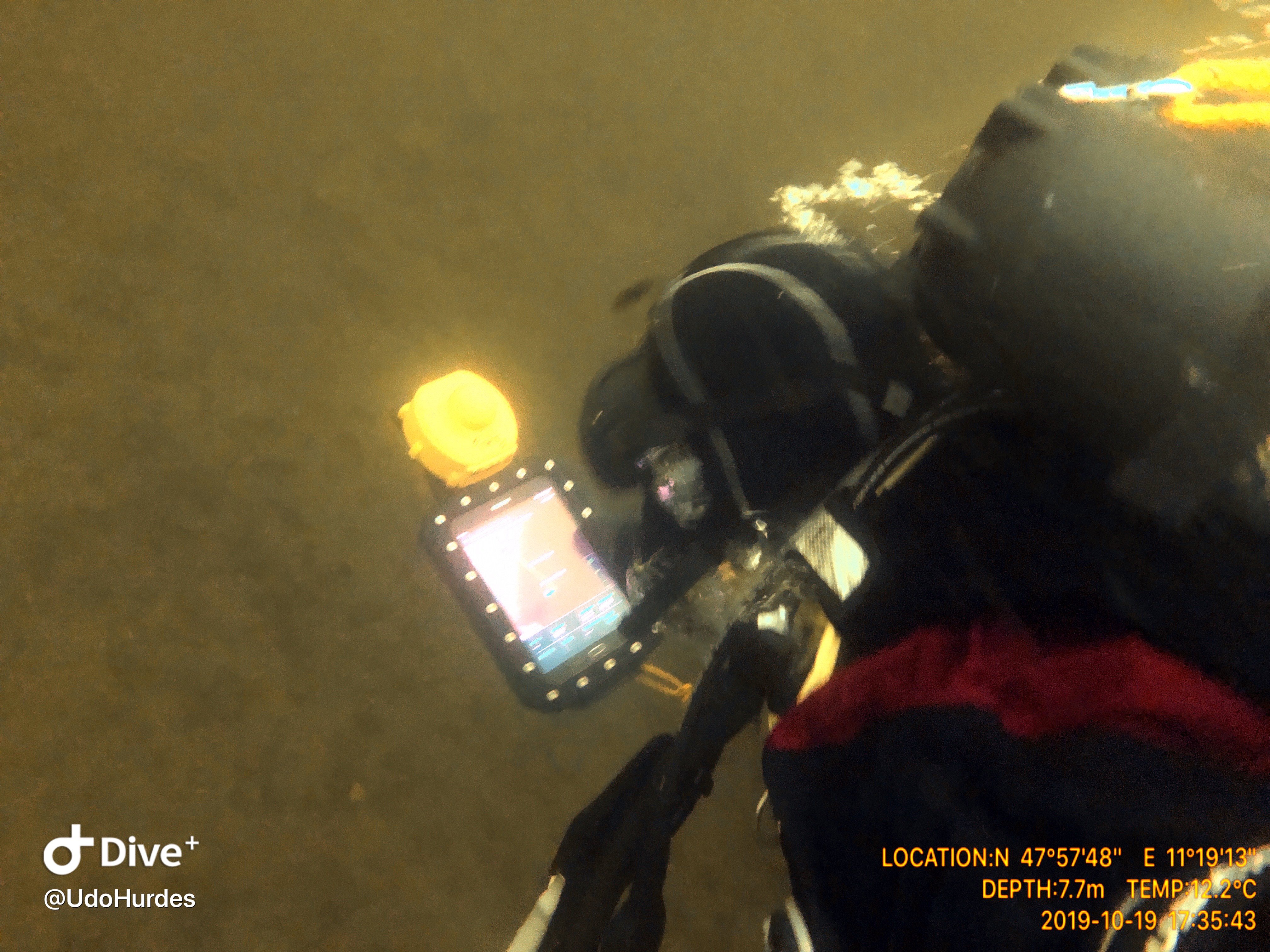
 Alltab in action
Alltab in action
") View from Navigator (diver's view)
View from Navigator (diver's view)
") Real time tracking and messaging (onboard view)
Real time tracking and messaging (onboard view)

The final task involved finding an object detected earlier with side scan sonar. A UWIS Diver Unit was mounted on the ROV to provide its position and depth, updating every two seconds.
The UWIS location data was transmitted wirelessly to DeepVision's DeepView 5.0 software on the surface, displaying UWIS buoys and all diver units. The software was preloaded with potential object locations based on previous measurements, allowing precise navigation to the target.
In practice, the object, a small dinghy, was located directly. The UWIS system proved efficient in integrating sonar findings with ROV tracking.
 Base onboard
Base onboard
") DeepView (green dot is ROV)
DeepView (green dot is ROV)
 Remote control
Remote control
 The "wreck"
The "wreck"
") Sonar and ROV's track (log data)
Sonar and ROV's track (log data)
 Track in Google Earth shows efficiency.
Track in Google Earth shows efficiency.

Exercise Highlights
- Real-time tracking of divers and ROV via UWIS Tracker and DeepView 5.0.
- Successful use of the Alltab tablet for diver navigation without guide ropes.
- Efficient integration of sonar data with ROV tracking to locate a submerged object.
This exercise demonstrated the versatility of the UWIS system in enhancing search and rescue operations, whether tracking divers, controlling ROVs, or integrating sonar findings.
After successful trial - THANK YOU DLRG!