UWIS dive: Marine habitat mapping and monitoring
UWIS is a Professional Tool for Marine Habitat Mapping and Monitoring
Mission: Demonstrate the use of the UWIS system for ROV and diver-based marine habitat mapping and monitoring tasks. The events were hosted by Metsähallitus Parks & Wildlife Finland and took place in the Baltic Sea.
Watch the videos here:
Metsähallitus Parks & Wildlife Finland, Metsähallitus Marine habitat mapping and monitoring
We had the opportunity to showcase the UWIS system to Metsähallitus professionals during their fieldwork. The first demonstration took place in the Ulko-Tammio National Park area, and the second, more fieldwork-oriented test, was conducted at the Sandkallan reefs near Porvoo.
The primary goal was to demonstrate how UWIS can enhance their marine monitoring tasks. During the trials, the UWIS system was used for:
- ROV navigation and control.
- Diver navigation, communication, and observation marking in shallow waters.
- Integrating location data with ROV-recorded videos.
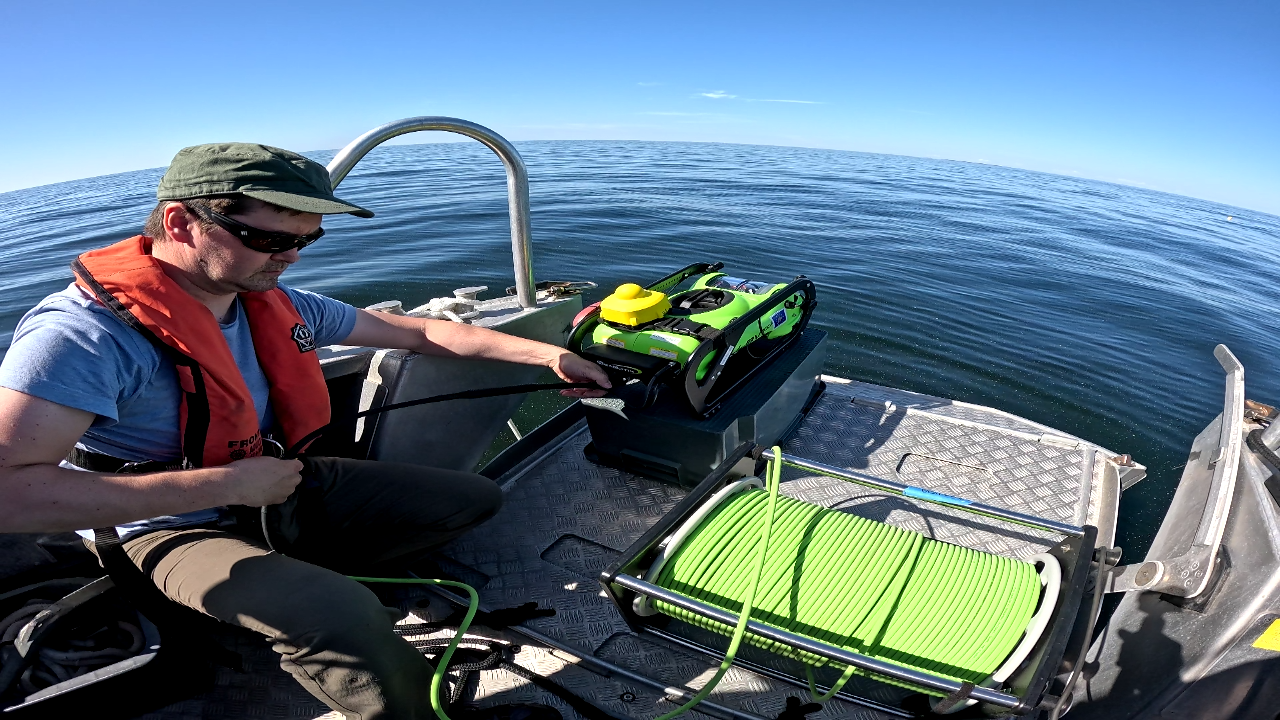
The first ROV dive highlighted UWIS’s effectiveness, even in very shallow water and near rocky outcrops. We also discovered the importance of compensating for the approximately 100g weight of the UWIS Diver Unit on the ROV by using flotation to optimize maneuverability.


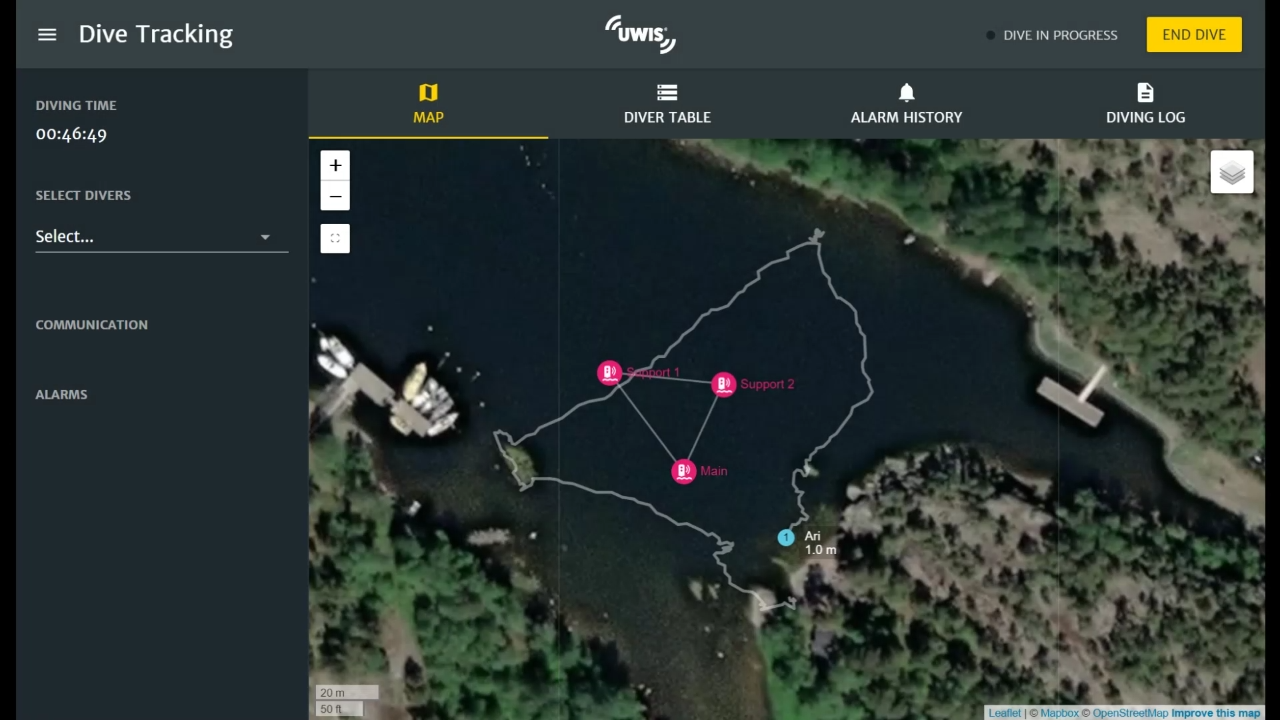
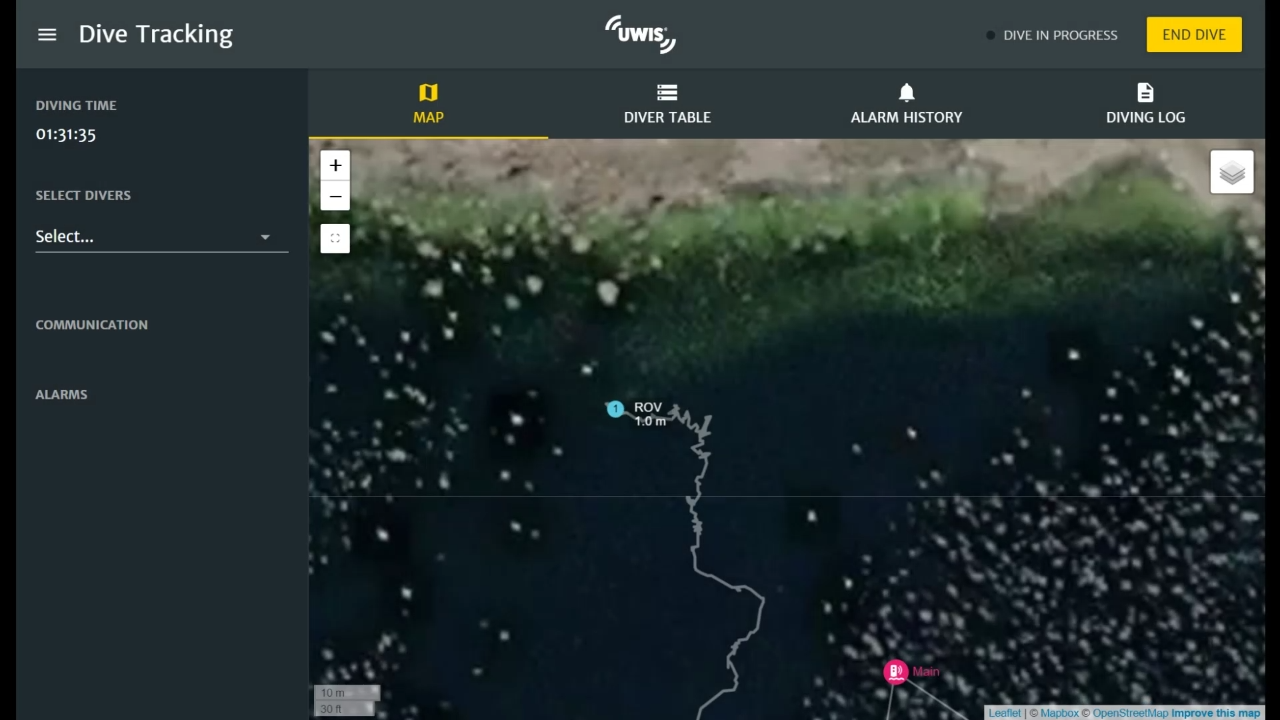
UWIS provided real-time location data to the UWIS Tracker software every two seconds, allowing precise ROV navigation.
- In one scenario, a clear and controlled route was achieved despite the target being far from the buoys and located in shallow, rocky water.
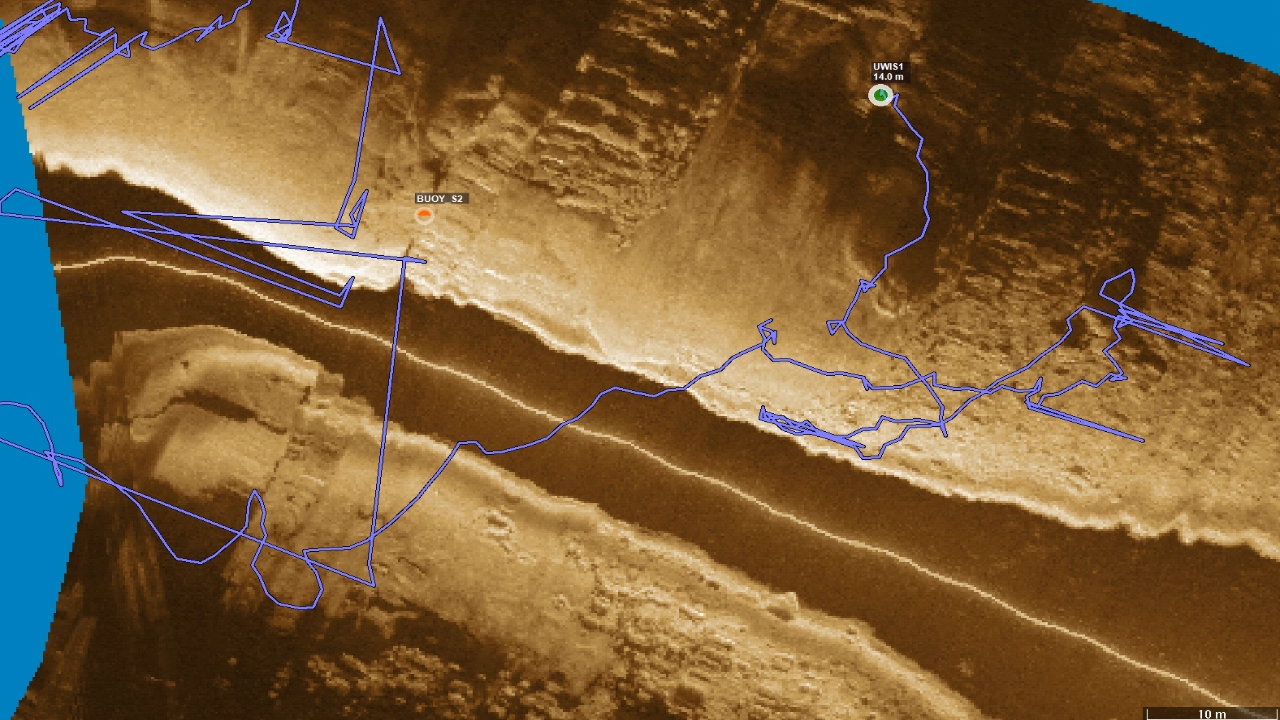
- In another test, DeepView software overlaid UWIS diver unit locations directly onto a side scan mosaic, enabling quick and accurate identification of rocky formations.
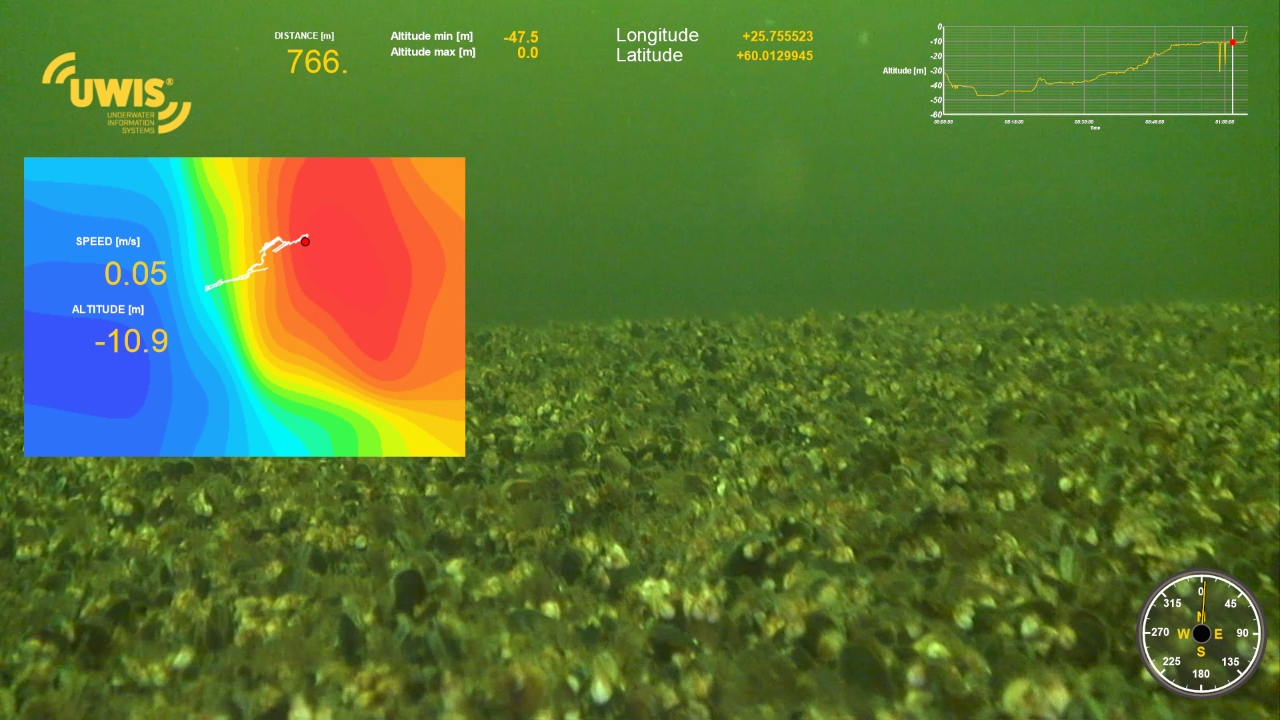
The ROV footage was later enhanced using Dashware software, integrating UWIS data into custom gauges and indicators. Synchronization points were determined using timestamps, such as the moment the ROV surfaced. In one instance, the ROV’s route was mapped onto a bathymetric chart generated the previous day using sonar.
Data displayed on the video included:
- Coordinates.
- Real-time, minimum, and maximum depths.
- Distance traveled and speed.
- Heading direction.
Shallow Water Snorkeling Test
Although no diving-specific studies were conducted during these trials, UWIS was put to the test in shallow, rocky water through snorkeling—a notoriously challenging environment for acoustic devices.
The diver used an Alltab underwater tablet for:
- Navigation and communication with surface observers.
- Marking observations on the map and locating them later using the program’s guidance functions.